 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBoosting Light-Weight Depth Estimation Via Knowledge Distillation
Paper and Code
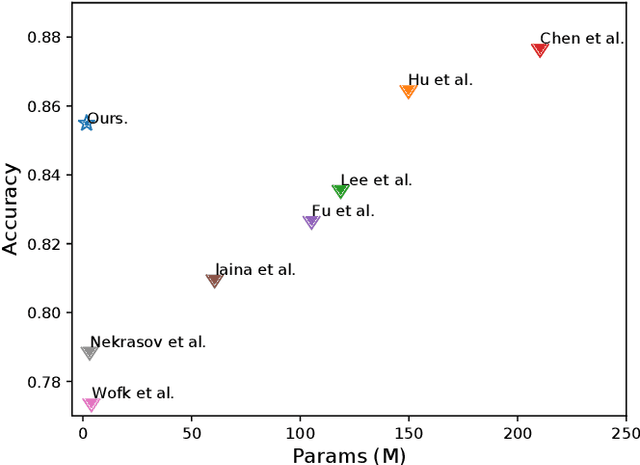

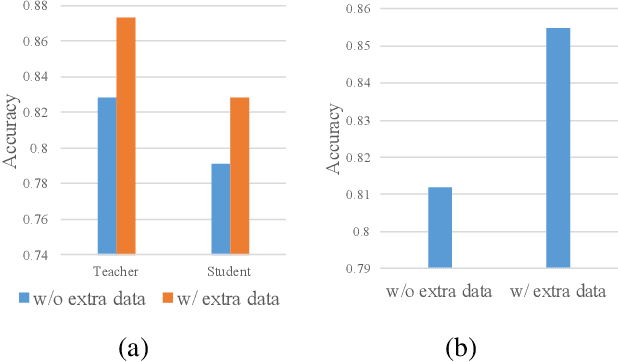
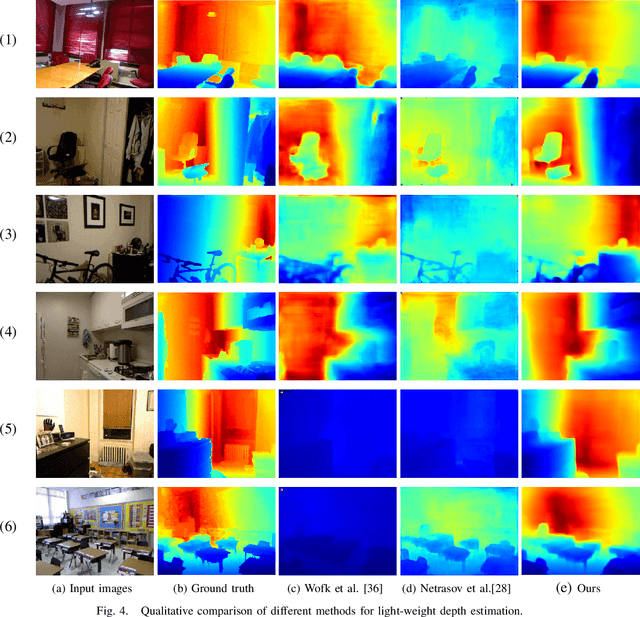
The advanced performance of depth estimation is achieved by the employment of large and complex neural networks. While the performance has still been continuously improved, we argue that the depth estimation has to be accurate and efficient. It's a preliminary requirement for real-world applications. However, fast depth estimation tends to lower the performance as the trade-off between the model's capacity and accuracy. In this paper, we attempt to archive highly accurate depth estimation with a light-weight network. To this end, we first introduce a compact network that can estimate a depth map in real-time. We then technically show two complementary and necessary strategies to improve the performance of the light-weight network. As the number of real-world scenes is infinite, the first is the employment of auxiliary data that increases the diversity of training data. The second is the use of knowledge distillation to further boost the performance. Through extensive and rigorous experiments, we show that our method outperforms previous light-weight methods in terms of inference accuracy, computational efficiency and generalization. We can achieve comparable performance compared to state-of-the-of-art methods with only 1% parameters, on the other hand, our method outperforms other light-weight methods by a significant margin.