 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAVisT: A Benchmark for Visual Object Tracking in Adverse Visibility
Paper and Code
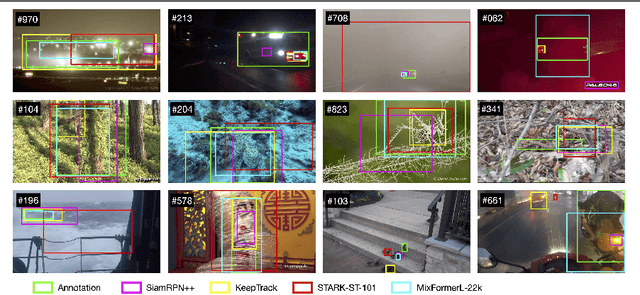


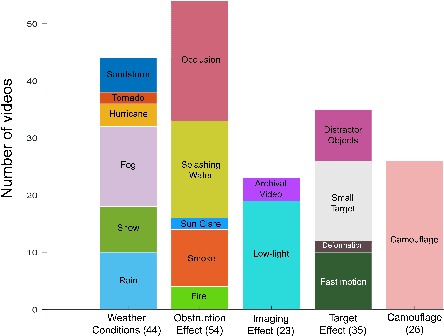
One of the key factors behind the recent success in visual tracking is the availability of dedicated benchmarks. While being greatly benefiting to the tracking research, existing benchmarks do not pose the same difficulty as before with recent trackers achieving higher performance mainly due to (i) the introduction of more sophisticated transformers-based methods and (ii) the lack of diverse scenarios with adverse visibility such as, severe weather conditions, camouflage and imaging effects. We introduce AVisT, a dedicated benchmark for visual tracking in diverse scenarios with adverse visibility. AVisT comprises 120 challenging sequences with 80k annotated frames, spanning 18 diverse scenarios broadly grouped into five attributes with 42 object categories. The key contribution of AVisT is diverse and challenging scenarios covering severe weather conditions such as, dense fog, heavy rain and sandstorm; obstruction effects including, fire, sun glare and splashing water; adverse imaging effects such as, low-light; target effects including, small targets and distractor objects along with camouflage. We further benchmark 17 popular and recent trackers on AVisT with detailed analysis of their tracking performance across attributes, demonstrating a big room for improvement in performance. We believe that AVisT can greatly benefit the tracking community by complementing the existing benchmarks, in developing new creative tracking solutions in order to continue pushing the boundaries of the state-of-the-art. Our dataset along with the complete tracking performance evaluation is available at: https://github.com/visionml/pytracking