 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Search for Photoacoustic Marker Using Automated Transrectal Ultrasound
Paper and Code
Jul 20, 2023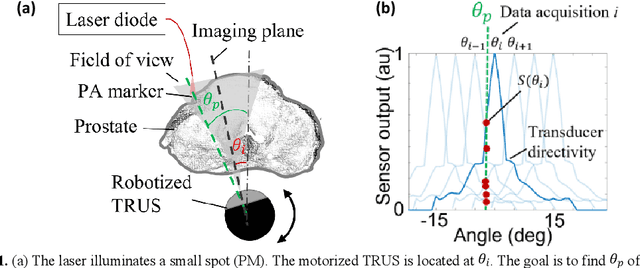
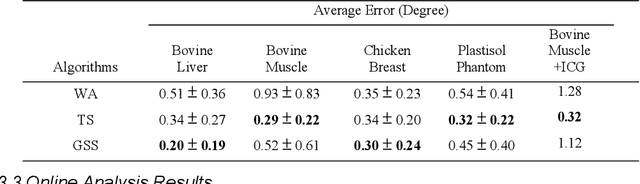
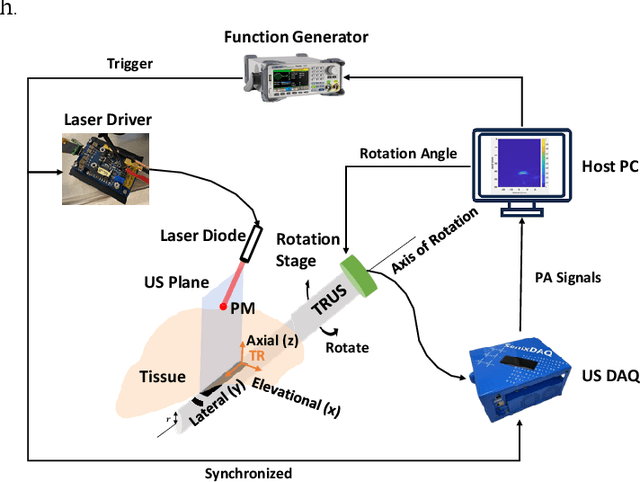
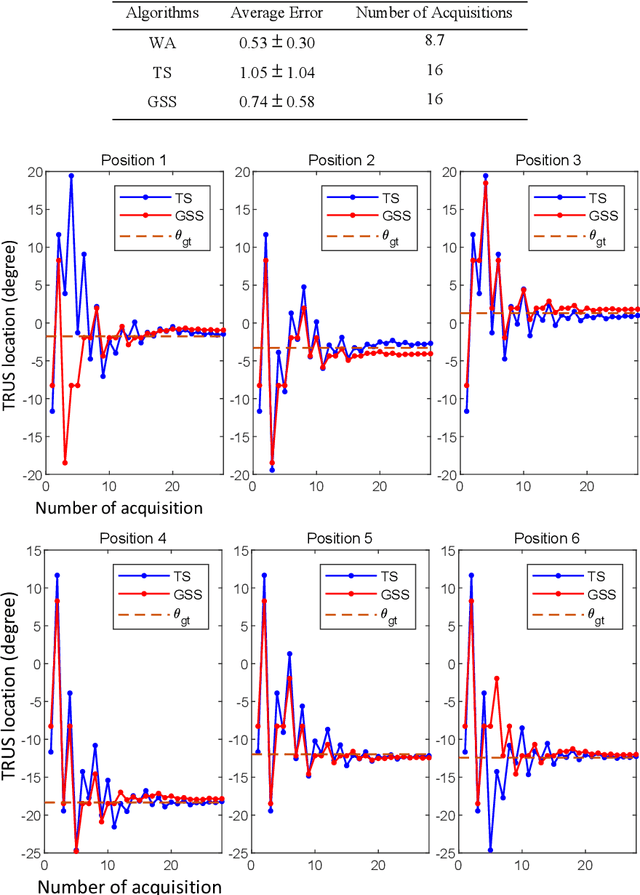
Real-time transrectal ultrasound (TRUS) image guidance during robot-assisted laparoscopic radical prostatectomy has the potential to enhance surgery outcomes. Whether conventional or photoacoustic TRUS is used, the robotic system and the TRUS must be registered to each other. Accurate registration can be performed using photoacoustic (PA markers). However, this requires a manual search by an assistant [19]. This paper introduces the first automatic search for PA markers using a transrectal ultrasound robot. This effectively reduces the challenges associated with the da Vinci-TRUS registration. This paper investigated the performance of three search algorithms in simulation and experiment: Weighted Average (WA), Golden Section Search (GSS), and Ternary Search (TS). For validation, a surgical prostate scenario was mimicked and various ex vivo tissues were tested. As a result, the WA algorithm can achieve 0.53 degree average error after 9 data acquisitions, while the TS and GSS algorithm can achieve 0.29 degree and 0.48 degree average errors after 28 data acquisitions.