 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAudio-Visual Grounding Referring Expression for Robotic Manipulation
Paper and Code
Sep 22, 2021
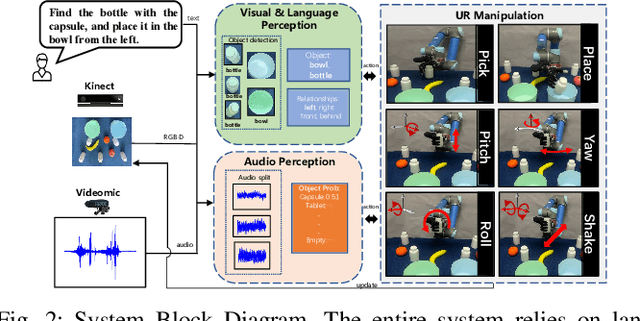
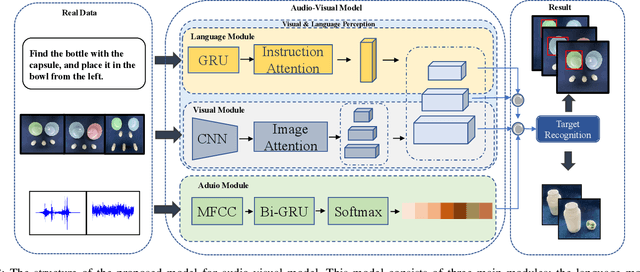
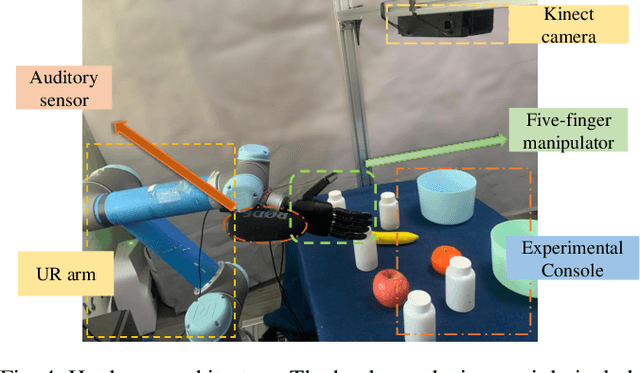
Referring expressions are commonly used when referring to a specific target in people's daily dialogue. In this paper, we develop a novel task of audio-visual grounding referring expression for robotic manipulation. The robot leverages both the audio and visual information to understand the referring expression in the given manipulation instruction and the corresponding manipulations are implemented. To solve the proposed task, an audio-visual framework is proposed for visual localization and sound recognition. We have also established a dataset which contains visual data, auditory data and manipulation instructions for evaluation. Finally, extensive experiments are conducted both offline and online to verify the effectiveness of the proposed audio-visual framework. And it is demonstrated that the robot performs better with the audio-visual data than with only the visual data.