 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Human Reconstruction in the Wild with Collaborative Aerial Cameras
Paper and Code
Aug 09, 2021
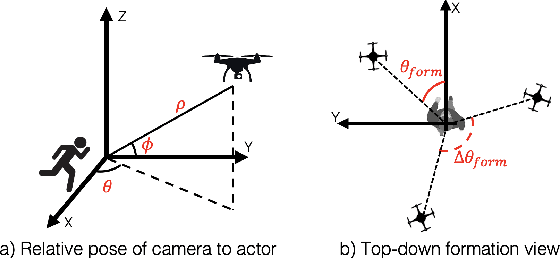
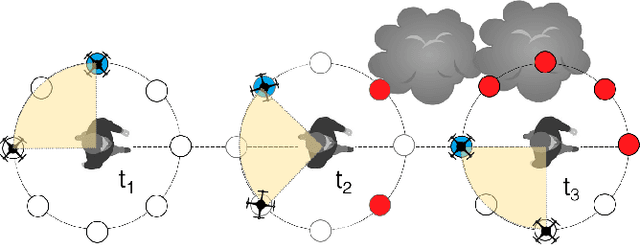

Aerial vehicles are revolutionizing applications that require capturing the 3D structure of dynamic targets in the wild, such as sports, medicine, and entertainment. The core challenges in developing a motion-capture system that operates in outdoors environments are: (1) 3D inference requires multiple simultaneous viewpoints of the target, (2) occlusion caused by obstacles is frequent when tracking moving targets, and (3) the camera and vehicle state estimation is noisy. We present a real-time aerial system for multi-camera control that can reconstruct human motions in natural environments without the use of special-purpose markers. We develop a multi-robot coordination scheme that maintains the optimal flight formation for target reconstruction quality amongst obstacles. We provide studies evaluating system performance in simulation, and validate real-world performance using two drones while a target performs activities such as jogging and playing soccer. Supplementary video: https://youtu.be/jxt91vx0cns