 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Iterative Co-Saliency Framework for RGBD Images
Paper and Code
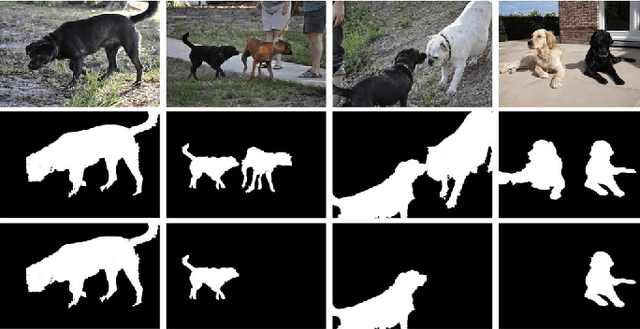
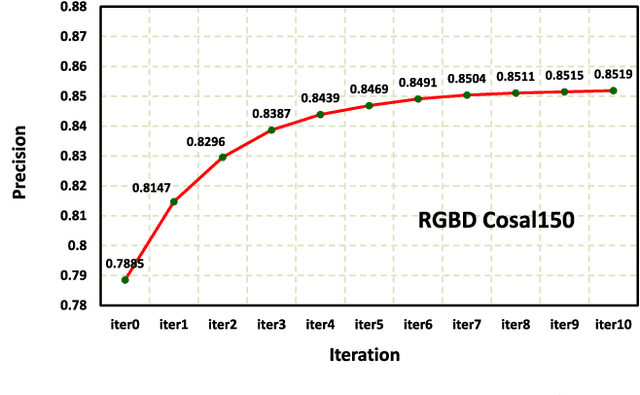
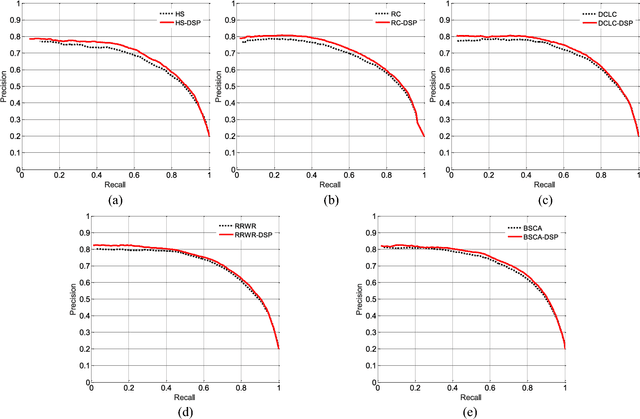
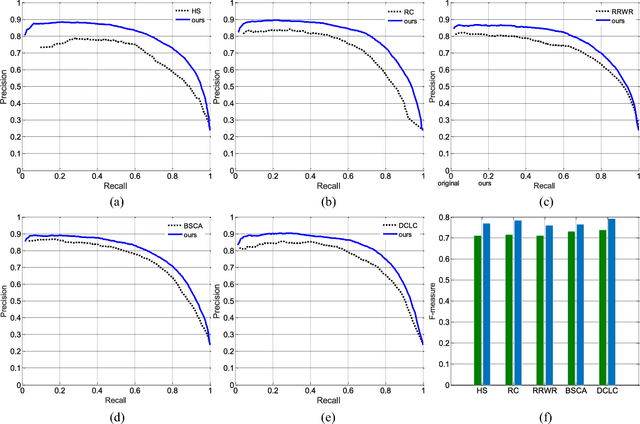
As a newly emerging and significant topic in computer vision community, co-saliency detection aims at discovering the common salient objects in multiple related images. The existing methods often generate the co-saliency map through a direct forward pipeline which is based on the designed cues or initialization, but lack the refinement-cycle scheme. Moreover, they mainly focus on RGB image and ignore the depth information for RGBD images. In this paper, we propose an iterative RGBD co-saliency framework, which utilizes the existing single saliency maps as the initialization, and generates the final RGBD cosaliency map by using a refinement-cycle model. Three schemes are employed in the proposed RGBD co-saliency framework, which include the addition scheme, deletion scheme, and iteration scheme. The addition scheme is used to highlight the salient regions based on intra-image depth propagation and saliency propagation, while the deletion scheme filters the saliency regions and removes the non-common salient regions based on interimage constraint. The iteration scheme is proposed to obtain more homogeneous and consistent co-saliency map. Furthermore, a novel descriptor, named depth shape prior, is proposed in the addition scheme to introduce the depth information to enhance identification of co-salient objects. The proposed method can effectively exploit any existing 2D saliency model to work well in RGBD co-saliency scenarios. The experiments on two RGBD cosaliency datasets demonstrate the effectiveness of our proposed framework.