 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAllenAct: A Framework for Embodied AI Research
Paper and Code



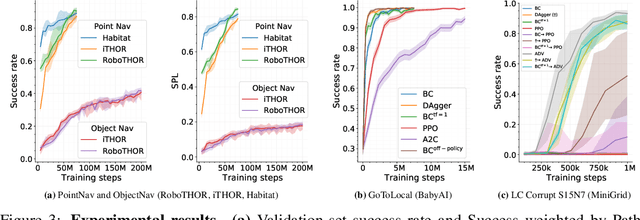
The domain of Embodied AI, in which agents learn to complete tasks through interaction with their environment from egocentric observations, has experienced substantial growth with the advent of deep reinforcement learning and increased interest from the computer vision, NLP, and robotics communities. This growth has been facilitated by the creation of a large number of simulated environments (such as AI2-THOR, Habitat and CARLA), tasks (like point navigation, instruction following, and embodied question answering), and associated leaderboards. While this diversity has been beneficial and organic, it has also fragmented the community: a huge amount of effort is required to do something as simple as taking a model trained in one environment and testing it in another. This discourages good science. We introduce AllenAct, a modular and flexible learning framework designed with a focus on the unique requirements of Embodied AI research. AllenAct provides first-class support for a growing collection of embodied environments, tasks and algorithms, provides reproductions of state-of-the-art models and includes extensive documentation, tutorials, start-up code, and pre-trained models. We hope that our framework makes Embodied AI more accessible and encourages new researchers to join this exciting area. The framework can be accessed at: https://allenact.org/