 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Environment Modeling Based Reinforcement Learning for Collision Avoidance in Complex Scenes
Paper and Code
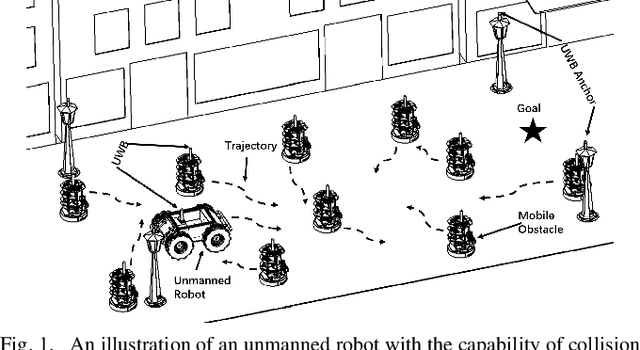
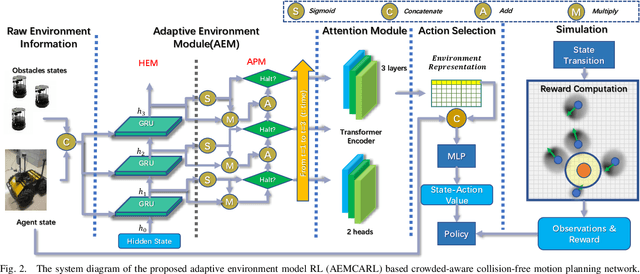
The major challenges of collision avoidance for robot navigation in crowded scenes lie in accurate environment modeling, fast perceptions, and trustworthy motion planning policies. This paper presents a novel adaptive environment model based collision avoidance reinforcement learning (i.e., AEMCARL) framework for an unmanned robot to achieve collision-free motions in challenging navigation scenarios. The novelty of this work is threefold: (1) developing a hierarchical network of gated-recurrent-unit (GRU) for environment modeling; (2) developing an adaptive perception mechanism with an attention module; (3) developing an adaptive reward function for the reinforcement learning (RL) framework to jointly train the environment model, perception function and motion planning policy. The proposed method is tested with the Gym-Gazebo simulator and a group of robots (Husky and Turtlebot) under various crowded scenes. Both simulation and experimental results have demonstrated the superior performance of the proposed method over baseline methods.