 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Conditional Neural Movement Primitives via Representation Sharing Between Supervised and Reinforcement Learning
Paper and Code
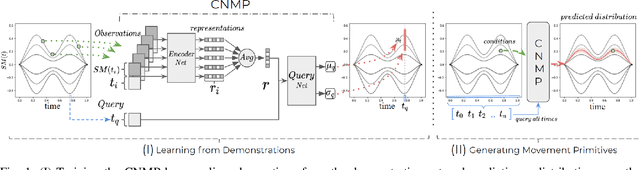
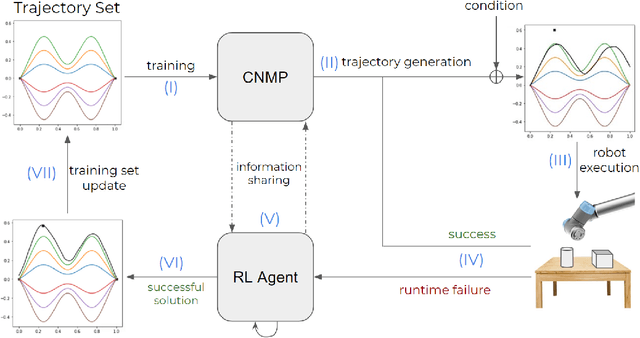
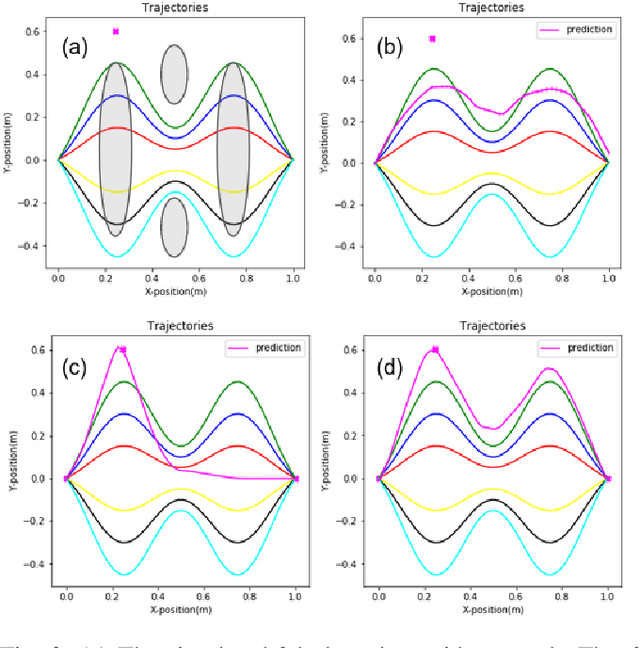
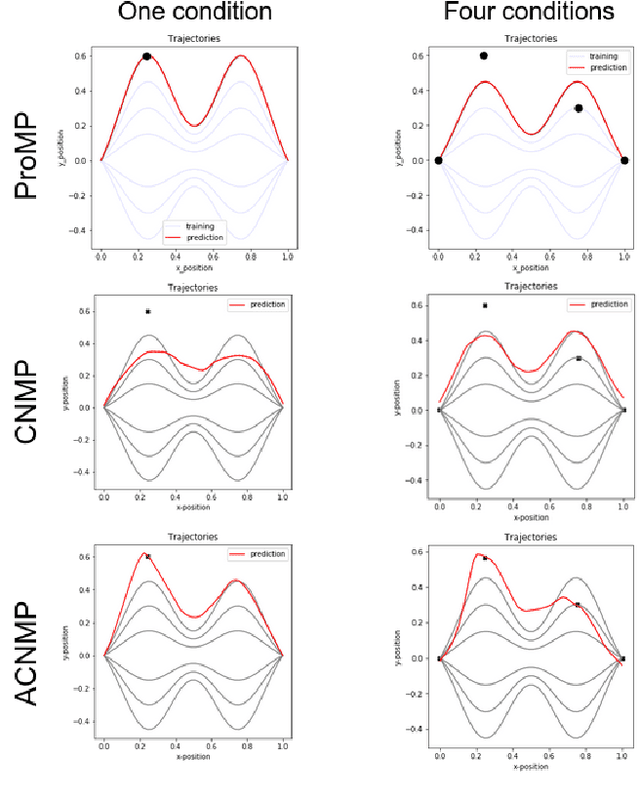
Learning by Demonstration provides a sample efficient way to equip robots with complex sensorimotor skills in supervised manner. Several movement primitive representations can be used for flexible motor representation and learning. A recent state-of-the art approach is Conditional Neural Movement Primitives (CNMP) that can learn non-linear relations between environment parameters and complex multi-modal trajectories from a few expert demonstrations by forming powerful latent space representations. In this study, to improve the applicability of CNMP to changing tasks and/or environments, we couple it with a reinforcement learning agent that exploits the formed representations by the original CNMP network, and learns to generate synthetic demonstrations for further learning. This enables the CNMP network to generalize to new environments by adapting its internal representations. In the current implementation, the reinforcement learning agent is triggered when a failure in task execution is detected, and the CNMP is trained with the newly discovered demonstration (trajectory), which shares essential characteristics with the original demonstrations due to the representation sharing. As a result, the overall system increases its capacity and handle situations in scenarios where the initial CNMP network can not produce a useful trajectory. To show the validity of our proposed model, we compare our approach with original CNMP work and other movement primitives approaches. Furthermore, we presents the experimental results from the implementation of the proposed model on real robotics setups, which indicate the applicability of our approach as an effective adaptive learning by demonstration system.