 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Structure Learning of Causal DAGs via Directed Clique Tree
Paper and Code
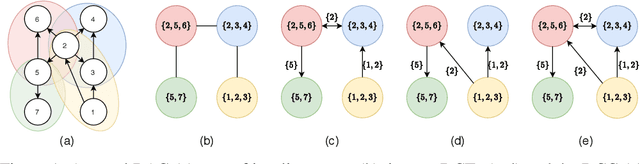
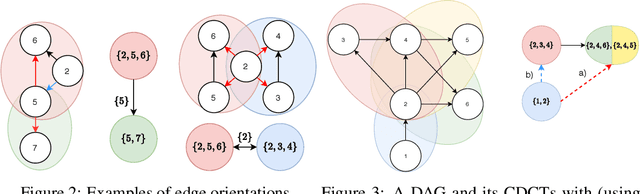


A growing body of work has begun to study intervention design for efficient structure learning of causal directed acyclic graphs (DAGs). A typical setting is a causally sufficient setting, i.e. a system with no latent confounders, selection bias, or feedback, when the essential graph of the observational equivalence class (EC) is given as an input and interventions are assumed to be noiseless. Most existing works focus on worst-case or average-case lower bounds for the number of interventions required to orient a DAG. These worst-case lower bounds only establish that the largest clique in the essential graph could make it difficult to learn the true DAG. In this work, we develop a universal lower bound for single-node interventions that establishes that the largest clique is always a fundamental impediment to structure learning. Specifically, we present a decomposition of a DAG into independently orientable components through directed clique trees and use it to prove that the number of single-node interventions necessary to orient any DAG in an EC is at least the sum of half the size of the largest cliques in each chain component of the essential graph. Moreover, we present a two-phase intervention design algorithm that, under certain conditions on the chordal skeleton, matches the optimal number of interventions up to a multiplicative logarithmic factor in the number of maximal cliques. We show via synthetic experiments that our algorithm can scale to much larger graphs than most of the related work and achieves better worst-case performance than other scalable approaches. A code base to recreate these results can be found at https://github.com/csquires/dct-policy