 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeACR-Pose: Adversarial Canonical Representation Reconstruction Network for Category Level 6D Object Pose Estimation
Paper and Code
Nov 20, 2021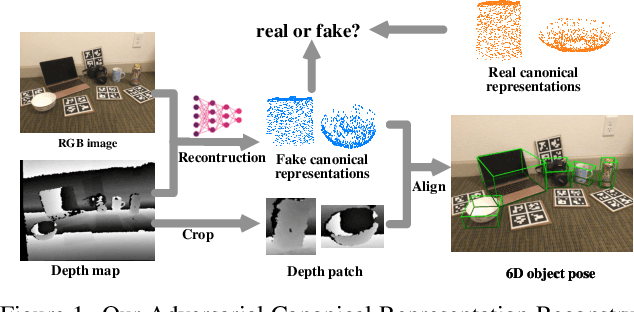

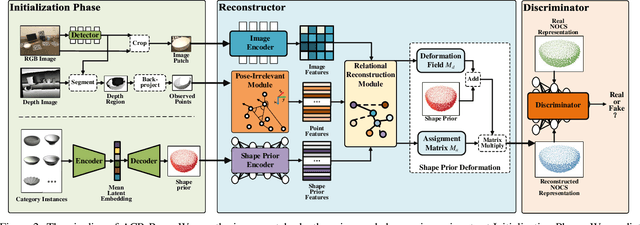

Recently, category-level 6D object pose estimation has achieved significant improvements with the development of reconstructing canonical 3D representations. However, the reconstruction quality of existing methods is still far from excellent. In this paper, we propose a novel Adversarial Canonical Representation Reconstruction Network named ACR-Pose. ACR-Pose consists of a Reconstructor and a Discriminator. The Reconstructor is primarily composed of two novel sub-modules: Pose-Irrelevant Module (PIM) and Relational Reconstruction Module (RRM). PIM tends to learn canonical-related features to make the Reconstructor insensitive to rotation and translation, while RRM explores essential relational information between different input modalities to generate high-quality features. Subsequently, a Discriminator is employed to guide the Reconstructor to generate realistic canonical representations. The Reconstructor and the Discriminator learn to optimize through adversarial training. Experimental results on the prevalent NOCS-CAMERA and NOCS-REAL datasets demonstrate that our method achieves state-of-the-art performance.