 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAbstract-to-Executable Trajectory Translation for One-Shot Task Generalization
Paper and Code
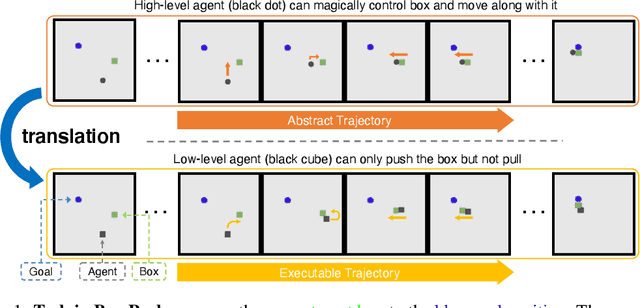
Training long-horizon robotic policies in complex physical environments is essential for many applications, such as robotic manipulation. However, learning a policy that can generalize to unseen tasks is challenging. In this work, we propose to achieve one-shot task generalization by decoupling plan generation and plan execution. Specifically, our method solves complex long-horizon tasks in three steps: build a paired abstract environment by simplifying geometry and physics, generate abstract trajectories, and solve the original task by an abstract-to-executable trajectory translator. In the abstract environment, complex dynamics such as physical manipulation are removed, making abstract trajectories easier to generate. However, this introduces a large domain gap between abstract trajectories and the actual executed trajectories as abstract trajectories lack low-level details and are not aligned frame-to-frame with the executed trajectory. In a manner reminiscent of language translation, our approach leverages a seq-to-seq model to overcome the large domain gap between the abstract and executable trajectories, enabling the low-level policy to follow the abstract trajectory. Experimental results on various unseen long-horizon tasks with different robot embodiments demonstrate the practicability of our methods to achieve one-shot task generalization.