 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hypergradient Approach to Robust Regression without Correspondence
Paper and Code

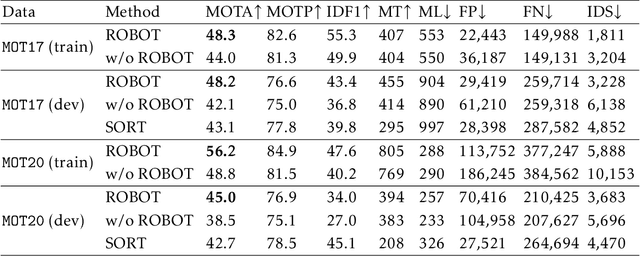
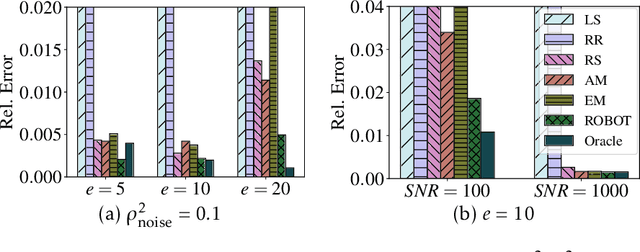

We consider a regression problem, where the correspondence between input and output data is not available. Such shuffled data is commonly observed in many real world problems. Taking flow cytometry as an example, the measuring instruments are unable to preserve the correspondence between the samples and the measurements. Due to the combinatorial nature, most of existing methods are only applicable when the sample size is small, and limited to linear regression models. To overcome such bottlenecks, we propose a new computational framework - ROBOT- for the shuffled regression problem, which is applicable to large data and complex models. Specifically, we propose to formulate the regression without correspondence as a continuous optimization problem. Then by exploiting the interaction between the regression model and the data correspondence, we propose to develop a hypergradient approach based on differentiable programming techniques. Such a hypergradient approach essentially views the data correspondence as an operator of the regression, and therefore allows us to find a better descent direction for the model parameter by differentiating through the data correspondence. ROBOT is quite general, and can be further extended to the inexact correspondence setting, where the input and output data are not necessarily exactly aligned. Thorough numerical experiments show that ROBOT achieves better performance than existing methods in both linear and nonlinear regression tasks, including real-world applications such as flow cytometry and multi-object tracking.