 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Analysis of Decision-Level Fusion for Multimodal Driver Behaviour Understanding
Paper and Code
Apr 10, 2022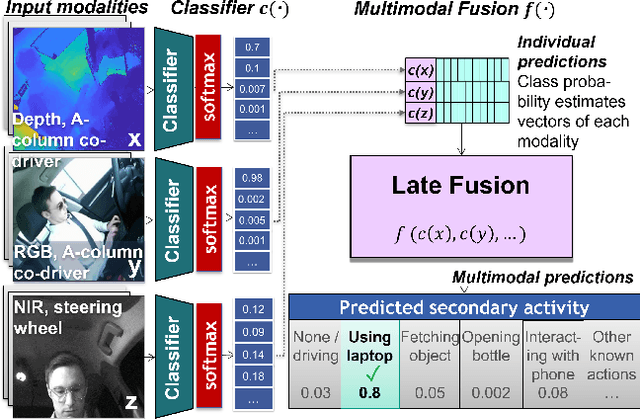


Visual recognition inside the vehicle cabin leads to safer driving and more intuitive human-vehicle interaction but such systems face substantial obstacles as they need to capture different granularities of driver behaviour while dealing with highly limited body visibility and changing illumination. Multimodal recognition mitigates a number of such issues: prediction outcomes of different sensors complement each other due to different modality-specific strengths and weaknesses. While several late fusion methods have been considered in previously published frameworks, they constantly feature different architecture backbones and building blocks making it very hard to isolate the role of the chosen late fusion strategy itself. This paper presents an empirical evaluation of different paradigms for decision-level late fusion in video-based driver observation. We compare seven different mechanisms for joining the results of single-modal classifiers which have been both popular, (e.g. score averaging) and not yet considered (e.g. rank-level fusion) in the context of driver observation evaluating them based on different criteria and benchmark settings. This is the first systematic study of strategies for fusing outcomes of multimodal predictors inside the vehicles, conducted with the goal to provide guidance for fusion scheme selection.