 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA 64mW DNN-based Visual Navigation Engine for Autonomous Nano-Drones
Paper and Code

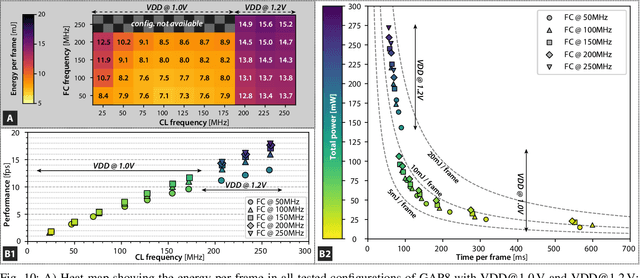
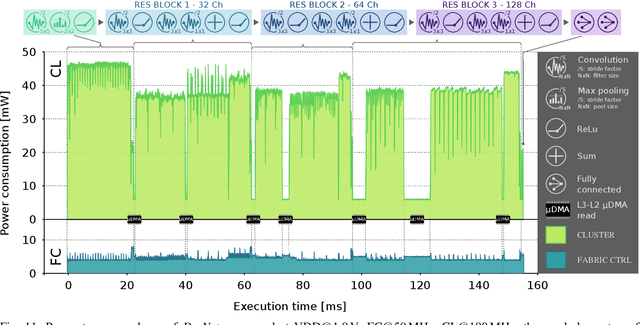

Fully-autonomous miniaturized robots (e.g., drones), with artificial intelligence (AI) based visual navigation capabilities are extremely challenging drivers of Internet-of-Things edge intelligence capabilities. Visual navigation based on AI approaches, such as deep neural networks (DNNs) are becoming pervasive for standard-size drones, but are considered out of reach for nanodrones with size of a few cm${}^\mathrm{2}$. In this work, we present the first (to the best of our knowledge) demonstration of a navigation engine for autonomous nano-drones capable of closed-loop end-to-end DNN-based visual navigation. To achieve this goal we developed a complete methodology for parallel execution of complex DNNs directly on-bard of resource-constrained milliwatt-scale nodes. Our system is based on GAP8, a novel parallel ultra-low-power computing platform, and a 27 g commercial, open-source CrazyFlie 2.0 nano-quadrotor. As part of our general methodology we discuss the software mapping techniques that enable the state-of-the-art deep convolutional neural network presented in [1] to be fully executed on-board within a strict 6 fps real-time constraint with no compromise in terms of flight results, while all processing is done with only 64 mW on average. Our navigation engine is flexible and can be used to span a wide performance range: at its peak performance corner it achieves 18 fps while still consuming on average just 3.5% of the power envelope of the deployed nano-aircraft.