 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3DLG-Detector: 3D Object Detection via Simultaneous Local-Global Feature Learning
Paper and Code
Aug 31, 2022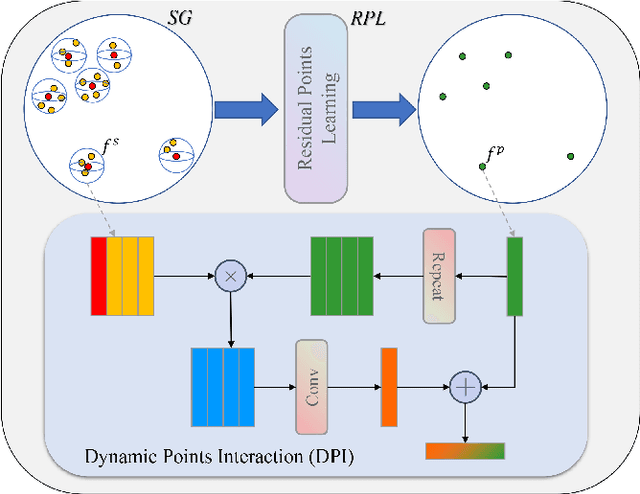
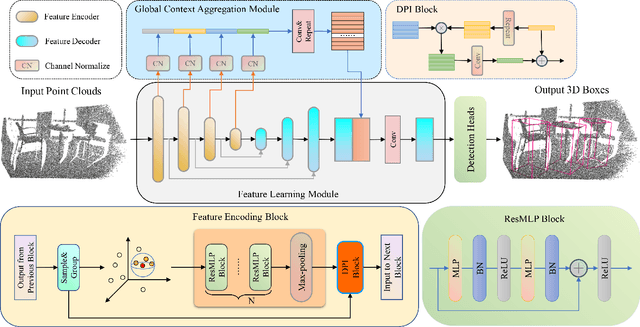
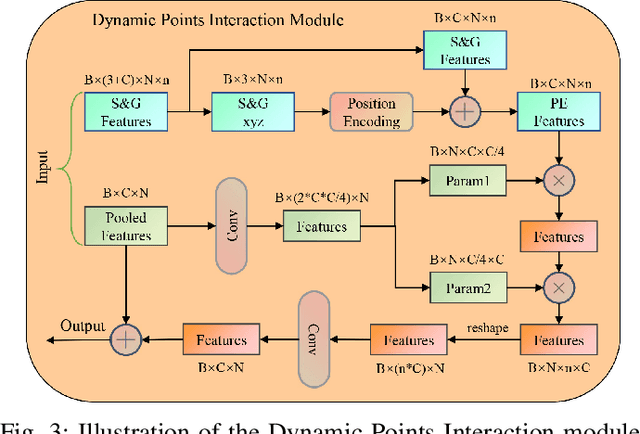
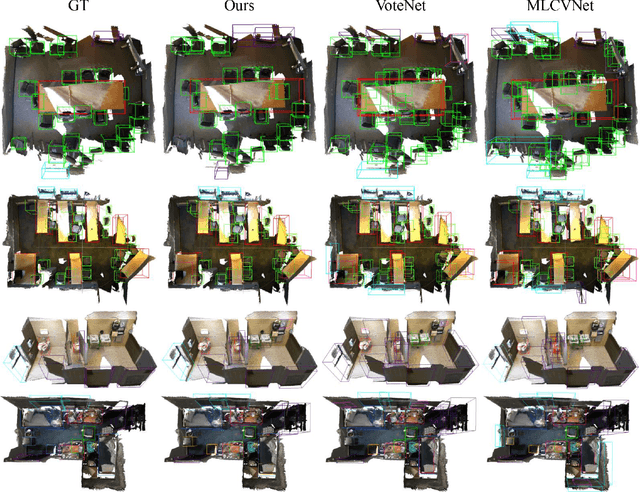
Capturing both local and global features of irregular point clouds is essential to 3D object detection (3OD). However, mainstream 3D detectors, e.g., VoteNet and its variants, either abandon considerable local features during pooling operations or ignore many global features in the whole scene context. This paper explores new modules to simultaneously learn local-global features of scene point clouds that serve 3OD positively. To this end, we propose an effective 3OD network via simultaneous local-global feature learning (dubbed 3DLG-Detector). 3DLG-Detector has two key contributions. First, it develops a Dynamic Points Interaction (DPI) module that preserves effective local features during pooling. Besides, DPI is detachable and can be incorporated into existing 3OD networks to boost their performance. Second, it develops a Global Context Aggregation module to aggregate multi-scale features from different layers of the encoder to achieve scene context-awareness. Our method shows improvements over thirteen competitors in terms of detection accuracy and robustness on both the SUN RGB-D and ScanNet datasets. Source code will be available upon publication.