 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3DCFS: Fast and Robust Joint 3D Semantic-Instance Segmentation via Coupled Feature Selection
Paper and Code
Mar 01, 2020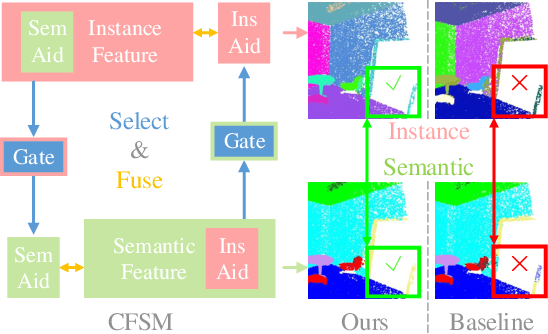
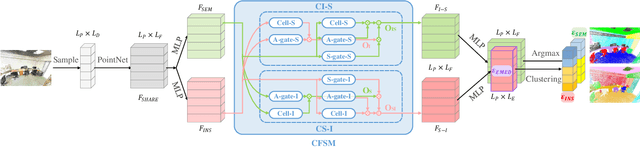
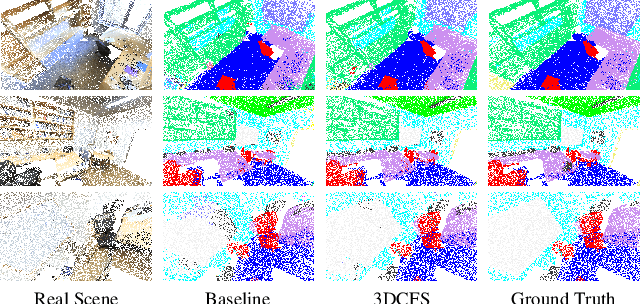
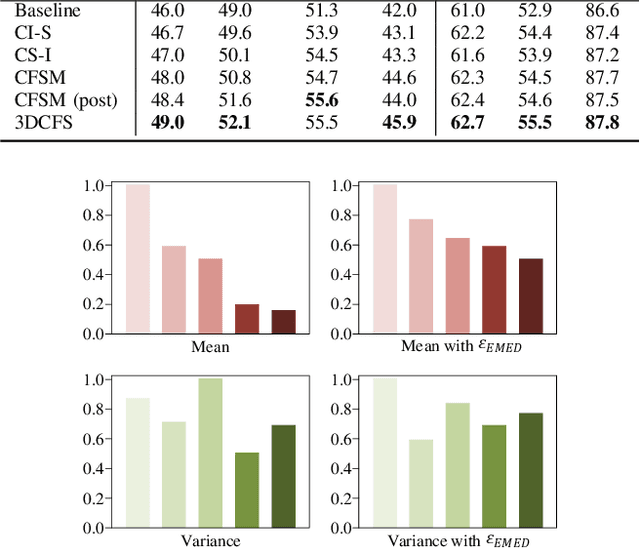
We propose a novel fast and robust 3D point clouds segmentation framework via coupled feature selection, named 3DCFS, that jointly performs semantic and instance segmentation. Inspired by the human scene perception process, we design a novel coupled feature selection module, named CFSM, that adaptively selects and fuses the reciprocal semantic and instance features from two tasks in a coupled manner. To further boost the performance of the instance segmentation task in our 3DCFS, we investigate a loss function that helps the model learn to balance the magnitudes of the output embedding dimensions during training, which makes calculating the Euclidean distance more reliable and enhances the generalizability of the model. Extensive experiments demonstrate that our 3DCFS outperforms state-of-the-art methods on benchmark datasets in terms of accuracy, speed and computational cost.