 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Robust Real-World Dexterous Grasping Policies via Implicit Shape Augmentation
Oct 24, 2022



Dexterous robotic hands have the capability to interact with a wide variety of household objects to perform tasks like grasping. However, learning robust real world grasping policies for arbitrary objects has proven challenging due to the difficulty of generating high quality training data. In this work, we propose a learning system (ISAGrasp) for leveraging a small number of human demonstrations to bootstrap the generation of a much larger dataset containing successful grasps on a variety of novel objects. Our key insight is to use a correspondence-aware implicit generative model to deform object meshes and demonstrated human grasps in order to generate a diverse dataset of novel objects and successful grasps for supervised learning, while maintaining semantic realism. We use this dataset to train a robust grasping policy in simulation which can be deployed in the real world. We demonstrate grasping performance with a four-fingered Allegro hand in both simulation and the real world, and show this method can handle entirely new semantic classes and achieve a 79% success rate on grasping unseen objects in the real world.
DexTransfer: Real World Multi-fingered Dexterous Grasping with Minimal Human Demonstrations
Sep 28, 2022
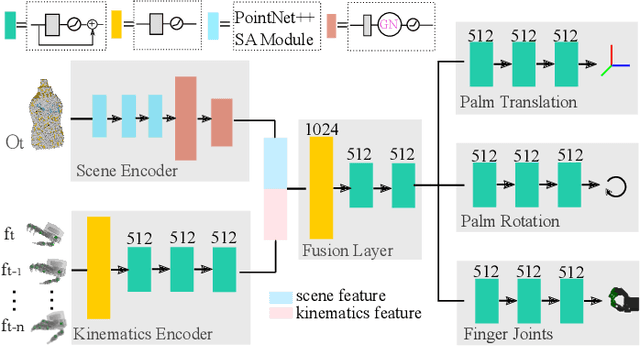
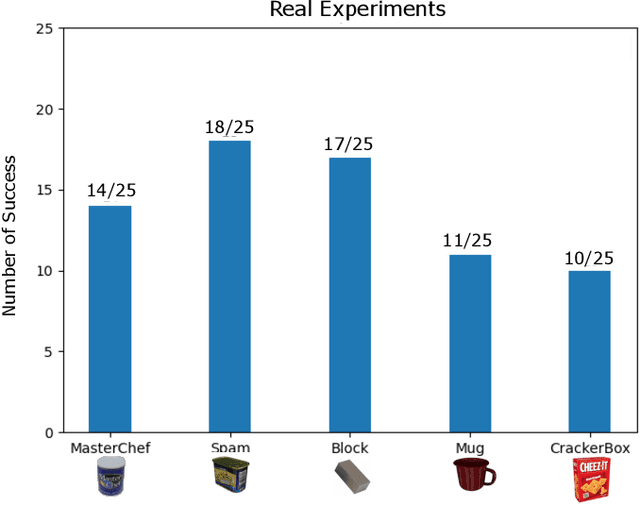
Teaching a multi-fingered dexterous robot to grasp objects in the real world has been a challenging problem due to its high dimensional state and action space. We propose a robot-learning system that can take a small number of human demonstrations and learn to grasp unseen object poses given partially occluded observations. Our system leverages a small motion capture dataset and generates a large dataset with diverse and successful trajectories for a multi-fingered robot gripper. By adding domain randomization, we show that our dataset provides robust grasping trajectories that can be transferred to a policy learner. We train a dexterous grasping policy that takes the point clouds of the object as input and predicts continuous actions to grasp objects from different initial robot states. We evaluate the effectiveness of our system on a 22-DoF floating Allegro Hand in simulation and a 23-DoF Allegro robot hand with a KUKA arm in real world. The policy learned from our dataset can generalize well on unseen object poses in both simulation and the real world