 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREASAN: Learning Reactive Safe Navigation for Legged Robots
Dec 10, 2025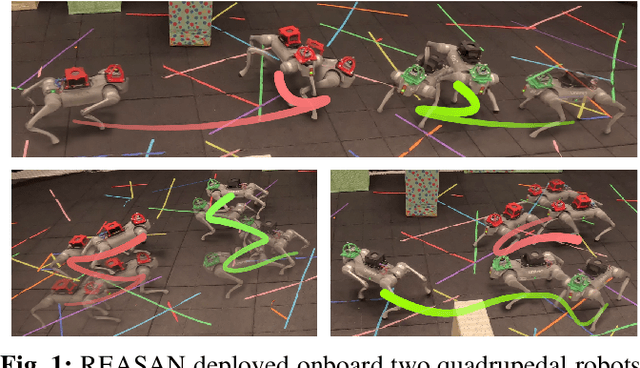
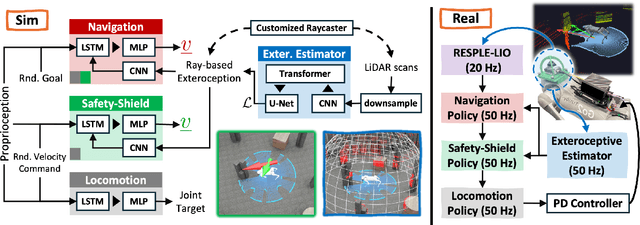
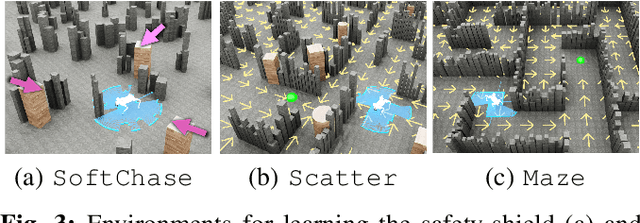
We present a novel modularized end-to-end framework for legged reactive navigation in complex dynamic environments using a single light detection and ranging (LiDAR) sensor. The system comprises four simulation-trained modules: three reinforcement-learning (RL) policies for locomotion, safety shielding, and navigation, and a transformer-based exteroceptive estimator that processes raw point-cloud inputs. This modular decomposition of complex legged motor-control tasks enables lightweight neural networks with simple architectures, trained using standard RL practices with targeted reward shaping and curriculum design, without reliance on heuristics or sophisticated policy-switching mechanisms. We conduct comprehensive ablations to validate our design choices and demonstrate improved robustness compared to existing approaches in challenging navigation tasks. The resulting reactive safe navigation (REASAN) system achieves fully onboard and real-time reactive navigation across both single- and multi-robot settings in complex environments. We release our training and deployment code at https://github.com/ASIG-X/REASAN.
RESPLE: Recursive Spline Estimation for LiDAR-Based Odometry
Apr 15, 2025We present a novel recursive Bayesian estimation framework for continuous-time six-DoF dynamic motion estimation using B-splines. The state vector consists of a recurrent set of position control points and orientation control point increments, enabling a straightforward modification of the iterated extended Kalman filter without involving the error-state formulation. The resulting recursive spline estimator (RESPLE) provides a versatile, pragmatic and lightweight solution for motion estimation and is further exploited for direct LiDAR-based odometry, supporting integration of one or multiple LiDARs and an IMU. We conduct extensive real-world benchmarking based on public datasets and own experiments, covering aerial, wheeled, legged, and wearable platforms operating in indoor, urban, wild environments with diverse LiDARs. RESPLE-based solutions achieve superior estimation accuracy and robustness over corresponding state-of-the-art systems, while attaining real-time performance. Notably, our LiDAR-only variant outperforms existing LiDAR-inertial systems in scenarios without significant LiDAR degeneracy, and showing further improvements when additional LiDAR and inertial sensors are incorporated for more challenging conditions. We release the source code and own experimental datasets at https://github.com/ASIG-X/RESPLE .
GPTR: Gaussian Process Trajectory Representation for Continuous-Time Motion Estimation
Oct 31, 2024



Continuous-time trajectory representation has gained significant popularity in recent years, as it offers an elegant formulation that allows the fusion of a larger number of sensors and sensing modalities, overcoming limitations of traditional discrete-time frameworks. To bolster the adoption of the continuous-time paradigm, we propose a so-called Gaussian Process Trajectory Representation (GPTR) framework for continuous-time motion estimation (CTME) tasks. Our approach stands out by employing a third-order random jerk model, featuring closed-form expressions for both rotational and translational state derivatives. This model provides smooth, continuous trajectory representations that are crucial for precise estimation of complex motion. To support the wider robotics and computer vision communities, we have made the source code for GPTR available as a light-weight header-only library. This format was chosen for its ease of integration, allowing developers to incorporate GPTR into existing systems without needing extensive code modifications. Moreover, we also provide a set of optimization examples with LiDAR, camera, IMU, UWB factors, and closed-form analytical Jacobians under the proposed GP framework. Our experiments demonstrate the efficacy and efficiency of GP-based trajectory representation in various motion estimation tasks, and the examples can serve as the prototype to help researchers quickly develop future applications such as batch optimization, calibration, sensor fusion, trajectory planning, etc., with continuous-time trajectory representation. Our project is accessible at https://github.com/brytsknguyen/gptr .
Gaussian Process on the Product of Directional Manifolds
Mar 13, 2023



We present a principled study on establishing Gaussian processes over variables on the product of directional manifolds. As a basic functional component, a manifold-adaptive kernel is presented based on the von Mises distribution for Gaussian process regression on unit circles. Afterward, a novel hypertoroidal von Mises kernel is introduced to enable topology-aware Gaussian processes on hypertori with consideration of correlational circular components. Based thereon, we enable multi-output regression for learning vector-valued functions on hypertori using intrinsic coregionalization model and provide analytical derivatives in hyperparameter optimization. The proposed multi-output hypertoroidal Gaussian process is further embedded to a data-driven recursive estimation scheme for learning unknown range sensing models of angle-of-arrival inputs. Evaluations on range-based localization show that the proposed scheme enables superior tracking accuracy over parametric modeling and common Gaussian processes.
Continuous-Time Ultra-Wideband-Inertial Fusion
Jan 22, 2023We present a novel continuous-time online state estimation framework using ultra-wideband and inertial sensors. For representing motion states continuously over time, quaternion-based cubic B-splines are exploited with efficient solutions to kinematic interpolations and spatial differentiations. Based thereon, a sliding-window spline fitting scheme is established for asynchronous multi-sensor fusion and online calibration. We evaluate the proposed system, SFUISE (spline fusion-based ultra-wideband-inertial state estimation), in real-world scenarios based on public data set and experiments. The proposed spline fusion scheme is real-time capable and delivers superior performance over state-of-the-art discrete-time schemes. We release the source code and own experimental data set at https://github.com/KIT-ISAS/SFUISE.