 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePDB: Not All Drivers Are the Same -- A Personalized Dataset for Understanding Driving Behavior
Mar 09, 2025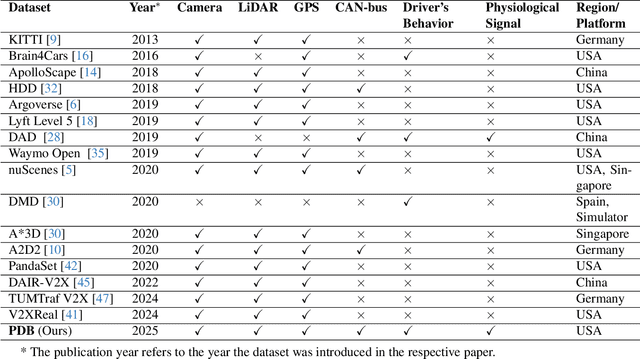
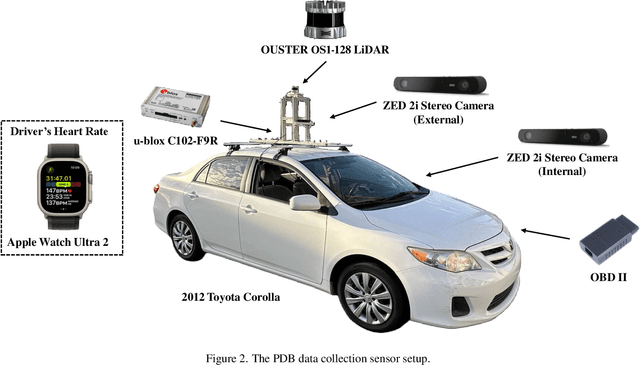
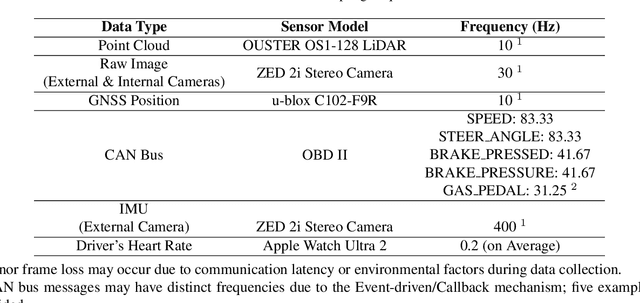
Driving behavior is inherently personal, influenced by individual habits, decision-making styles, and physiological states. However, most existing datasets treat all drivers as homogeneous, overlooking driver-specific variability. To address this gap, we introduce the Personalized Driving Behavior (PDB) dataset, a multi-modal dataset designed to capture personalization in driving behavior under naturalistic driving conditions. Unlike conventional datasets, PDB minimizes external influences by maintaining consistent routes, vehicles, and lighting conditions across sessions. It includes sources from 128-line LiDAR, front-facing camera video, GNSS, 9-axis IMU, CAN bus data (throttle, brake, steering angle), and driver-specific signals such as facial video and heart rate. The dataset features 12 participants, approximately 270,000 LiDAR frames, 1.6 million images, and 6.6 TB of raw sensor data. The processed trajectory dataset consists of 1,669 segments, each spanning 10 seconds with a 0.2-second interval. By explicitly capturing drivers' behavior, PDB serves as a unique resource for human factor analysis, driver identification, and personalized mobility applications, contributing to the development of human-centric intelligent transportation systems.
Investigating Personalized Driving Behaviors in Dilemma Zones: Analysis and Prediction of Stop-or-Go Decisions
May 06, 2024Dilemma zones at signalized intersections present a commonly occurring but unsolved challenge for both drivers and traffic operators. Onsets of the yellow lights prompt varied responses from different drivers: some may brake abruptly, compromising the ride comfort, while others may accelerate, increasing the risk of red-light violations and potential safety hazards. Such diversity in drivers' stop-or-go decisions may result from not only surrounding traffic conditions, but also personalized driving behaviors. To this end, identifying personalized driving behaviors and integrating them into advanced driver assistance systems (ADAS) to mitigate the dilemma zone problem presents an intriguing scientific question. In this study, we employ a game engine-based (i.e., CARLA-enabled) driving simulator to collect high-resolution vehicle trajectories, incoming traffic signal phase and timing information, and stop-or-go decisions from four subject drivers in various scenarios. This approach allows us to analyze personalized driving behaviors in dilemma zones and develop a Personalized Transformer Encoder to predict individual drivers' stop-or-go decisions. The results show that the Personalized Transformer Encoder improves the accuracy of predicting driver decision-making in the dilemma zone by 3.7% to 12.6% compared to the Generic Transformer Encoder, and by 16.8% to 21.6% over the binary logistic regression model.