 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSGFormer: Spherical Geometry Transformer for 360 Depth Estimation
Apr 23, 2024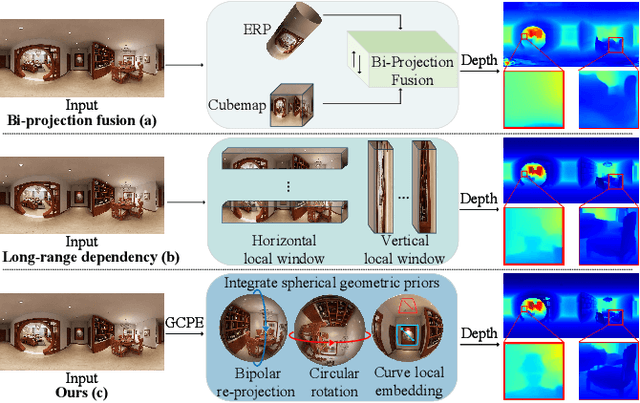
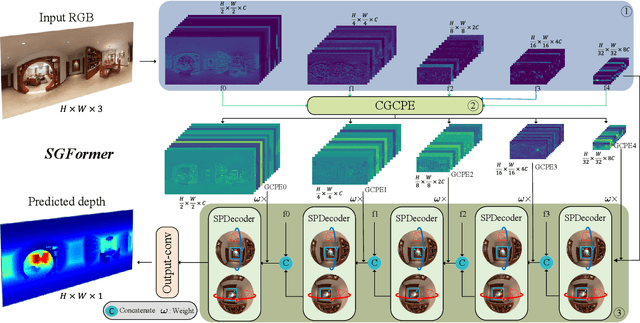
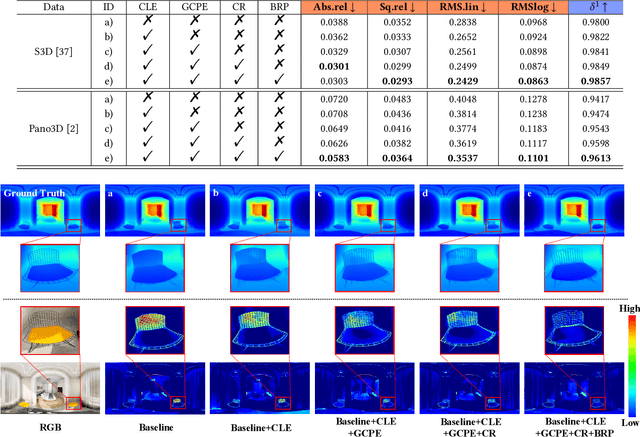
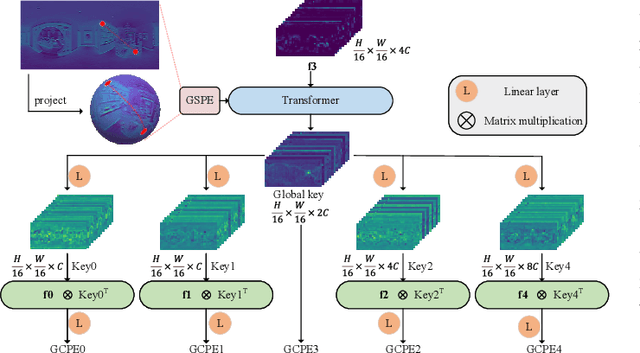
Panoramic distortion poses a significant challenge in 360 depth estimation, particularly pronounced at the north and south poles. Existing methods either adopt a bi-projection fusion strategy to remove distortions or model long-range dependencies to capture global structures, which can result in either unclear structure or insufficient local perception. In this paper, we propose a spherical geometry transformer, named SGFormer, to address the above issues, with an innovative step to integrate spherical geometric priors into vision transformers. To this end, we retarget the transformer decoder to a spherical prior decoder (termed SPDecoder), which endeavors to uphold the integrity of spherical structures during decoding. Concretely, we leverage bipolar re-projection, circular rotation, and curve local embedding to preserve the spherical characteristics of equidistortion, continuity, and surface distance, respectively. Furthermore, we present a query-based global conditional position embedding to compensate for spatial structure at varying resolutions. It not only boosts the global perception of spatial position but also sharpens the depth structure across different patches. Finally, we conduct extensive experiments on popular benchmarks, demonstrating our superiority over state-of-the-art solutions.
Unsupervised OmniMVS: Efficient Omnidirectional Depth Inference via Establishing Pseudo-Stereo Supervision
Feb 22, 2023



Omnidirectional multi-view stereo (MVS) vision is attractive for its ultra-wide field-of-view (FoV), enabling machines to perceive 360{\deg} 3D surroundings. However, the existing solutions require expensive dense depth labels for supervision, making them impractical in real-world applications. In this paper, we propose the first unsupervised omnidirectional MVS framework based on multiple fisheye images. To this end, we project all images to a virtual view center and composite two panoramic images with spherical geometry from two pairs of back-to-back fisheye images. The two 360{\deg} images formulate a stereo pair with a special pose, and the photometric consistency is leveraged to establish the unsupervised constraint, which we term "Pseudo-Stereo Supervision". In addition, we propose Un-OmniMVS, an efficient unsupervised omnidirectional MVS network, to facilitate the inference speed with two efficient components. First, a novel feature extractor with frequency attention is proposed to simultaneously capture the non-local Fourier features and local spatial features, explicitly facilitating the feature representation. Then, a variance-based light cost volume is put forward to reduce the computational complexity. Experiments exhibit that the performance of our unsupervised solution is competitive to that of the state-of-the-art (SoTA) supervised methods with better generalization in real-world data.