 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerated Quasi-Static FEM for Real-Time Modeling of Continuum Robots with Multiple Contacts and Large Deformation
Mar 10, 2025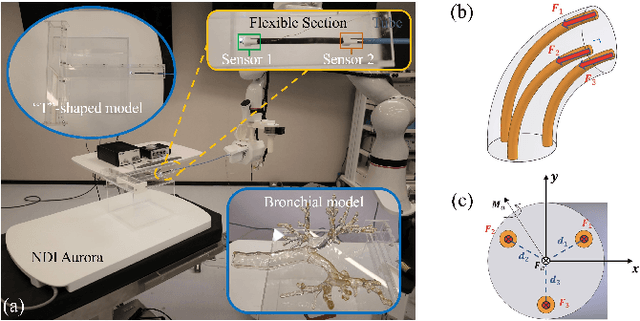
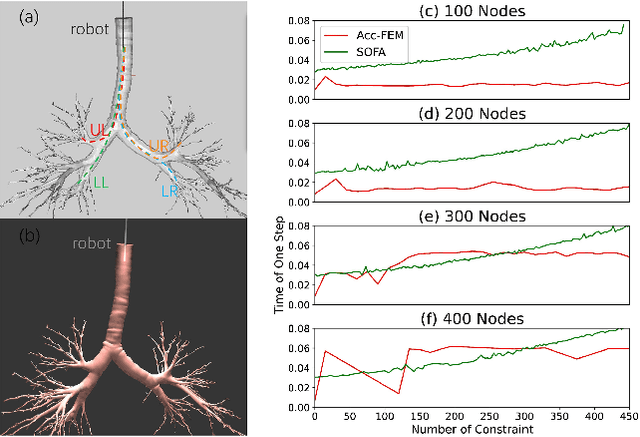
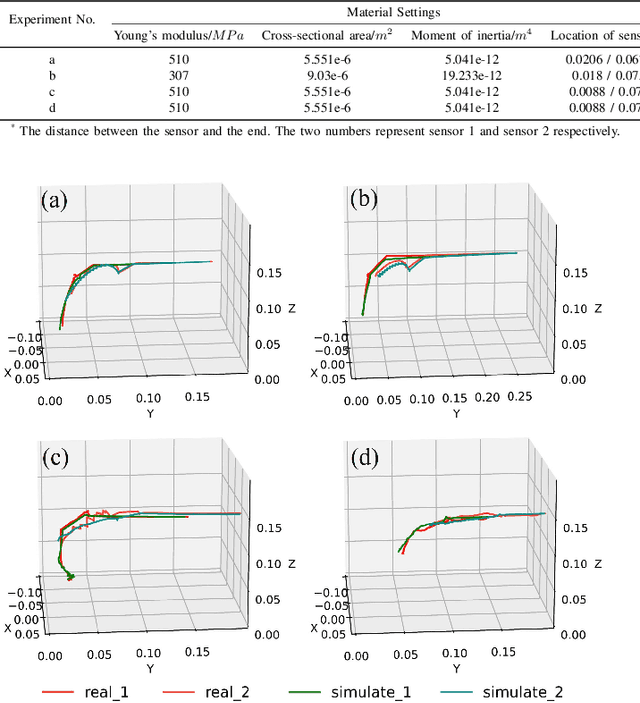

Continuum robots offer high flexibility and multiple degrees of freedom, making them ideal for navigating narrow lumens. However, accurately modeling their behavior under large deformations and frequent environmental contacts remains challenging. Current methods for solving the deformation of these robots, such as the Model Order Reduction and Gauss-Seidel (GS) methods, suffer from significant drawbacks. They experience reduced computational speed as the number of contact points increases and struggle to balance speed with model accuracy. To overcome these limitations, we introduce a novel finite element method (FEM) named Acc-FEM. Acc-FEM employs a large deformation quasi-static finite element model and integrates an accelerated solver scheme to handle multi-contact simulations efficiently. Additionally, it utilizes parallel computing with Graphics Processing Units (GPU) for real-time updates of the finite element models and collision detection. Extensive numerical experiments demonstrate that Acc-FEM significantly improves computational efficiency in modeling continuum robots with multiple contacts while achieving satisfactory accuracy, addressing the deficiencies of existing methods.