 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Should I Cite? A RAG Benchmark for Academic Citation Prediction
Jan 21, 2026With the rapid growth of Web-based academic publications, more and more papers are being published annually, making it increasingly difficult to find relevant prior work. Citation prediction aims to automatically suggest appropriate references, helping scholars navigate the expanding scientific literature. Here we present \textbf{CiteRAG}, the first comprehensive retrieval-augmented generation (RAG)-integrated benchmark for evaluating large language models on academic citation prediction, featuring a multi-level retrieval strategy, specialized retrievers, and generators. Our benchmark makes four core contributions: (1) We establish two instances of the citation prediction task with different granularity. Task 1 focuses on coarse-grained list-specific citation prediction, while Task 2 targets fine-grained position-specific citation prediction. To enhance these two tasks, we build a dataset containing 7,267 instances for Task 1 and 8,541 instances for Task 2, enabling comprehensive evaluation of both retrieval and generation. (2) We construct a three-level large-scale corpus with 554k papers spanning many major subfields, using an incremental pipeline. (3) We propose a multi-level hybrid RAG approach for citation prediction, fine-tuning embedding models with contrastive learning to capture complex citation relationships, paired with specialized generation models. (4) We conduct extensive experiments across state-of-the-art language models, including closed-source APIs, open-source models, and our fine-tuned generators, demonstrating the effectiveness of our framework. Our open-source toolkit enables reproducible evaluation and focuses on academic literature, providing the first comprehensive evaluation framework for citation prediction and serving as a methodological template for other scientific domains. Our source code and data are released at https://github.com/LQgdwind/CiteRAG.
Multimodal Multi-Agent Empowered Legal Judgment Prediction
Jan 21, 2026Legal Judgment Prediction (LJP) aims to predict the outcomes of legal cases based on factual descriptions, serving as a fundamental task to advance the development of legal systems. Traditional methods often rely on statistical analyses or role-based simulations but face challenges with multiple allegations, diverse evidence, and lack adaptability. In this paper, we introduce JurisMMA, a novel framework for LJP that effectively decomposes trial tasks, standardizes processes, and organizes them into distinct stages. Furthermore, we build JurisMM, a large dataset with over 100,000 recent Chinese judicial records, including both text and multimodal video-text data, enabling comprehensive evaluation. Experiments on JurisMM and the benchmark LawBench validate our framework's effectiveness. These results indicate that our framework is effective not only for LJP but also for a broader range of legal applications, offering new perspectives for the development of future legal methods and datasets.
Scalable Vision-Language-Action Model Pretraining for Robotic Manipulation with Real-Life Human Activity Videos
Oct 24, 2025



This paper presents a novel approach for pretraining robotic manipulation Vision-Language-Action (VLA) models using a large corpus of unscripted real-life video recordings of human hand activities. Treating human hand as dexterous robot end-effector, we show that "in-the-wild" egocentric human videos without any annotations can be transformed into data formats fully aligned with existing robotic V-L-A training data in terms of task granularity and labels. This is achieved by the development of a fully-automated holistic human activity analysis approach for arbitrary human hand videos. This approach can generate atomic-level hand activity segments and their language descriptions, each accompanied with framewise 3D hand motion and camera motion. We process a large volume of egocentric videos and create a hand-VLA training dataset containing 1M episodes and 26M frames. This training data covers a wide range of objects and concepts, dexterous manipulation tasks, and environment variations in real life, vastly exceeding the coverage of existing robot data. We design a dexterous hand VLA model architecture and pretrain the model on this dataset. The model exhibits strong zero-shot capabilities on completely unseen real-world observations. Additionally, fine-tuning it on a small amount of real robot action data significantly improves task success rates and generalization to novel objects in real robotic experiments. We also demonstrate the appealing scaling behavior of the model's task performance with respect to pretraining data scale. We believe this work lays a solid foundation for scalable VLA pretraining, advancing robots toward truly generalizable embodied intelligence.
MIRA: Medical Time Series Foundation Model for Real-World Health Data
Jun 09, 2025


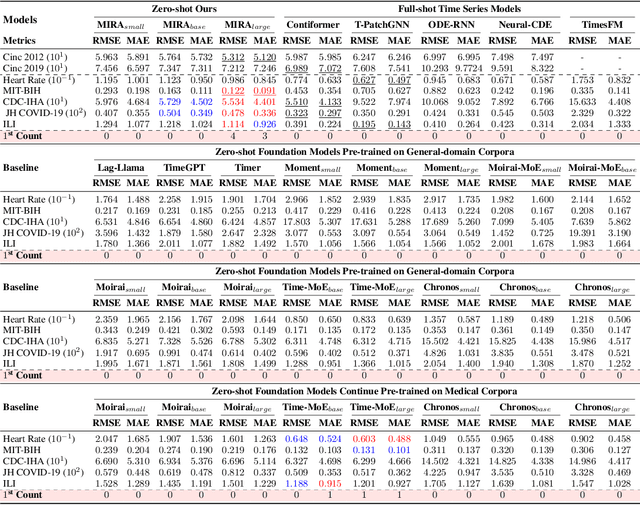
A unified foundation model for medical time series -- pretrained on open access and ethics board-approved medical corpora -- offers the potential to reduce annotation burdens, minimize model customization, and enable robust transfer across clinical institutions, modalities, and tasks, particularly in data-scarce or privacy-constrained environments. However, existing generalist time series foundation models struggle to handle medical time series data due to their inherent challenges, including irregular intervals, heterogeneous sampling rates, and frequent missing values. To address these challenges, we introduce MIRA, a unified foundation model specifically designed for medical time series forecasting. MIRA incorporates a Continuous-Time Rotary Positional Encoding that enables fine-grained modeling of variable time intervals, a frequency-specific mixture-of-experts layer that routes computation across latent frequency regimes to further promote temporal specialization, and a Continuous Dynamics Extrapolation Block based on Neural ODE that models the continuous trajectory of latent states, enabling accurate forecasting at arbitrary target timestamps. Pretrained on a large-scale and diverse medical corpus comprising over 454 billion time points collect from publicly available datasets, MIRA achieves reductions in forecasting errors by an average of 10% and 7% in out-of-distribution and in-distribution scenarios, respectively, when compared to other zero-shot and fine-tuned baselines. We also introduce a comprehensive benchmark spanning multiple downstream clinical tasks, establishing a foundation for future research in medical time series modeling.
HSSBench: Benchmarking Humanities and Social Sciences Ability for Multimodal Large Language Models
Jun 04, 2025



Multimodal Large Language Models (MLLMs) have demonstrated significant potential to advance a broad range of domains. However, current benchmarks for evaluating MLLMs primarily emphasize general knowledge and vertical step-by-step reasoning typical of STEM disciplines, while overlooking the distinct needs and potential of the Humanities and Social Sciences (HSS). Tasks in the HSS domain require more horizontal, interdisciplinary thinking and a deep integration of knowledge across related fields, which presents unique challenges for MLLMs, particularly in linking abstract concepts with corresponding visual representations. Addressing this gap, we present HSSBench, a dedicated benchmark designed to assess the capabilities of MLLMs on HSS tasks in multiple languages, including the six official languages of the United Nations. We also introduce a novel data generation pipeline tailored for HSS scenarios, in which multiple domain experts and automated agents collaborate to generate and iteratively refine each sample. HSSBench contains over 13,000 meticulously designed samples, covering six key categories. We benchmark more than 20 mainstream MLLMs on HSSBench and demonstrate that it poses significant challenges even for state-of-the-art models. We hope that this benchmark will inspire further research into enhancing the cross-disciplinary reasoning abilities of MLLMs, especially their capacity to internalize and connect knowledge across fields.
TransDiff: Diffusion-Based Method for Manipulating Transparent Objects Using a Single RGB-D Image
Mar 17, 2025Manipulating transparent objects presents significant challenges due to the complexities introduced by their reflection and refraction properties, which considerably hinder the accurate estimation of their 3D shapes. To address these challenges, we propose a single-view RGB-D-based depth completion framework, TransDiff, that leverages the Denoising Diffusion Probabilistic Models(DDPM) to achieve material-agnostic object grasping in desktop. Specifically, we leverage features extracted from RGB images, including semantic segmentation, edge maps, and normal maps, to condition the depth map generation process. Our method learns an iterative denoising process that transforms a random depth distribution into a depth map, guided by initially refined depth information, ensuring more accurate depth estimation in scenarios involving transparent objects. Additionally, we propose a novel training method to better align the noisy depth and RGB image features, which are used as conditions to refine depth estimation step by step. Finally, we utilized an improved inference process to accelerate the denoising procedure. Through comprehensive experimental validation, we demonstrate that our method significantly outperforms the baselines in both synthetic and real-world benchmarks with acceptable inference time. The demo of our method can be found on https://wang-haoxiao.github.io/TransDiff/