 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClosed-Form Pose Estimation of Endoluminal Medical Devices via Gradiometer-Based Electromagnetic Localization System
Jun 01, 2026Embedded magnetic tracking holds highly attractive prospects for remote navigation of endoluminal medical devices. However, existing six-degree-of-freedom pose recovery approaches often require pre-calibrated workspace field maps or iterative nonlinear optimization. This letter presents a Gradiometer-Based Electromagnetic Localization System (GELS), a closed-form tracking framework that uses a compact magnetometer array as an embedded quasi-gradiometer to estimate local magnetic fields and gradient tensors. These quantities are mapped by the Euler homogeneous relation to displacements between source and array, from which multi-source Procrustes registration recovers the array orientation and position using at least three non-collinear sources. The algorithm requires known source positions and array geometry, but no pre-calibrated workspace field maps, initial pose guesses, or calibrated excitation-source moments. The recovered pose also enables a proof-of-concept sub-level dipole localization task by serving as a mobile magnetic reference frame. Benchtop experiments across sensor-array configurations and excitation modes demonstrate sequence-averaged position errors of \SI{10.80}{\milli\meter}--\SI{15.57}{\milli\meter}, a fastest update rate of \SI{14.49}{\hertz}, and a median solver runtime of \SI{172.00}{\micro\second}. A perturbation-based error propagation analysis further identifies inter-sensor inconsistency and dipole-model mismatch as the dominant accuracy limits, thereby informing future sensor array and magnetic source design for further reducing pose-estimation error.
Topology-Inspired Morphological Descriptor for Soft Continuum Robots
Aug 01, 2025

This paper presents a topology-inspired morphological descriptor for soft continuum robots by combining a pseudo-rigid-body (PRB) model with Morse theory to achieve a quantitative characterization of robot morphologies. By counting critical points of directional projections, the proposed descriptor enables a discrete representation of multimodal configurations and facilitates morphological classification. Furthermore, we apply the descriptor to morphology control by formulating the target configuration as an optimization problem to compute actuation parameters that generate equilibrium shapes with desired topological features. The proposed framework provides a unified methodology for quantitative morphology description, classification, and control of soft continuum robots, with the potential to enhance their precision and adaptability in medical applications such as minimally invasive surgery and endovascular interventions.
Closed-Loop Magnetic Control of Medical Soft Continuum Robots for Deflection
Aug 06, 2024Magnetic soft continuum robots (MSCRs) have emerged as powerful devices in endovascular interventions owing to their hyperelastic fibre matrix and enhanced magnetic manipulability. Effective closed-loop control of tethered magnetic devices contributes to the achievement of autonomous vascular robotic surgery. In this article, we employ a magnetic actuation system equipped with a single rotatable permanent magnet to achieve closed-loop deflection control of the MSCR. To this end, we establish a differential kinematic model of MSCRs exposed to non-uniform magnetic fields. The relationship between the existence and uniqueness of Jacobian and the geometric position between robots is deduced. The accurate control direction induced by Jacobian is demonstrated to be crucial in simulations. Then, the corresponding quasi-static control (QSC) framework integrates a linear extended state observer to estimate model uncertainties. Finally, the effectiveness of the proposed QSC framework is validated through comparative trajectory tracking experiments with the PD controller under external disturbances. The proposed control framework effectively prevents the actuator from reaching the joint limit and achieves fast and low error-tracking performance without overshooting.
AO2-DETR: Arbitrary-Oriented Object Detection Transformer
May 25, 2022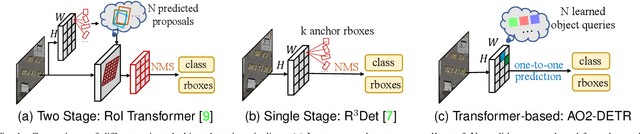
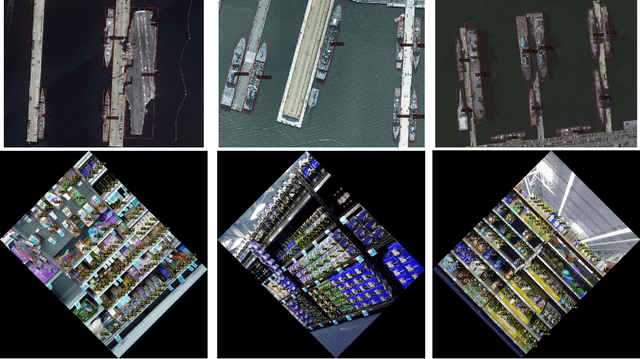
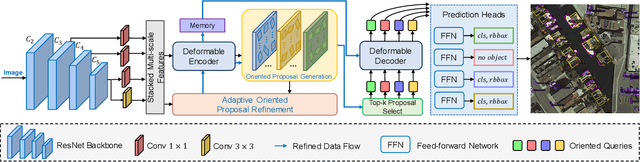
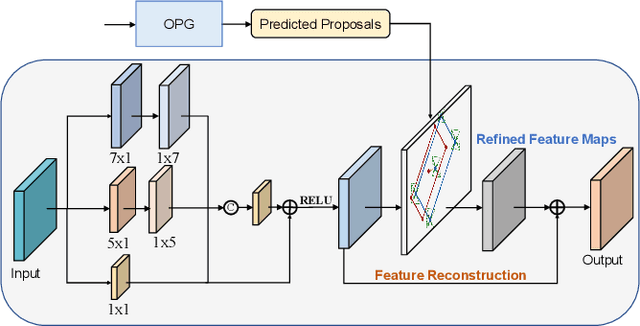
Arbitrary-oriented object detection (AOOD) is a challenging task to detect objects in the wild with arbitrary orientations and cluttered arrangements. Existing approaches are mainly based on anchor-based boxes or dense points, which rely on complicated hand-designed processing steps and inductive bias, such as anchor generation, transformation, and non-maximum suppression reasoning. Recently, the emerging transformer-based approaches view object detection as a direct set prediction problem that effectively removes the need for hand-designed components and inductive biases. In this paper, we propose an Arbitrary-Oriented Object DEtection TRansformer framework, termed AO2-DETR, which comprises three dedicated components. More precisely, an oriented proposal generation mechanism is proposed to explicitly generate oriented proposals, which provides better positional priors for pooling features to modulate the cross-attention in the transformer decoder. An adaptive oriented proposal refinement module is introduced to extract rotation-invariant region features and eliminate the misalignment between region features and objects. And a rotation-aware set matching loss is used to ensure the one-to-one matching process for direct set prediction without duplicate predictions. Our method considerably simplifies the overall pipeline and presents a new AOOD paradigm. Comprehensive experiments on several challenging datasets show that our method achieves superior performance on the AOOD task.