 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMOS: Modeling Object-Scene Associations in Generalized Category Discovery
Mar 15, 2025Generalized Category Discovery (GCD) is a classification task that aims to classify both base and novel classes in unlabeled images, using knowledge from a labeled dataset. In GCD, previous research overlooks scene information or treats it as noise, reducing its impact during model training. However, in this paper, we argue that scene information should be viewed as a strong prior for inferring novel classes. We attribute the misinterpretation of scene information to a key factor: the Ambiguity Challenge inherent in GCD. Specifically, novel objects in base scenes might be wrongly classified into base categories, while base objects in novel scenes might be mistakenly recognized as novel categories. Once the ambiguity challenge is addressed, scene information can reach its full potential, significantly enhancing the performance of GCD models. To more effectively leverage scene information, we propose the Modeling Object-Scene Associations (MOS) framework, which utilizes a simple MLP-based scene-awareness module to enhance GCD performance. It achieves an exceptional average accuracy improvement of 4% on the challenging fine-grained datasets compared to state-of-the-art methods, emphasizing its superior performance in fine-grained GCD. The code is publicly available at https://github.com/JethroPeng/MOS.
Generalized Category Discovery in Semantic Segmentation
Nov 20, 2023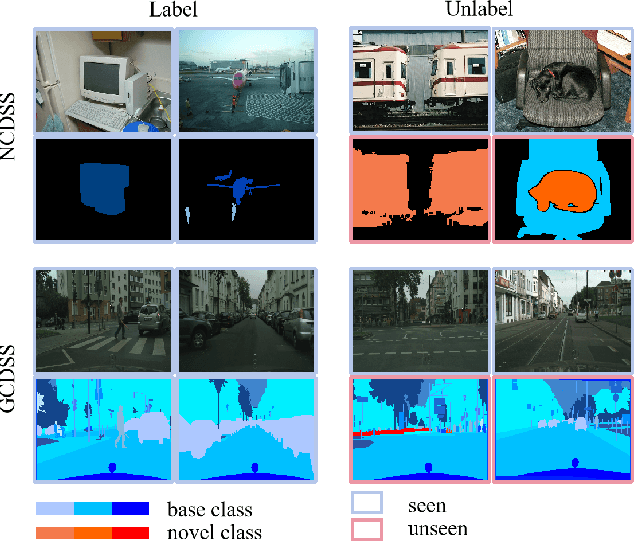
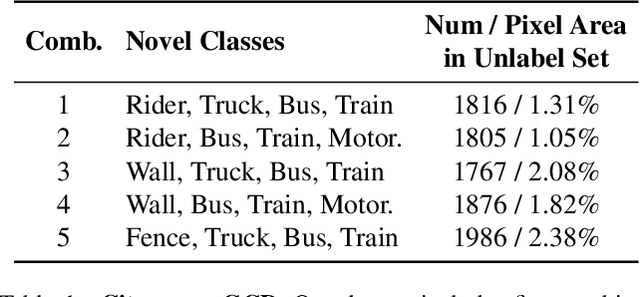
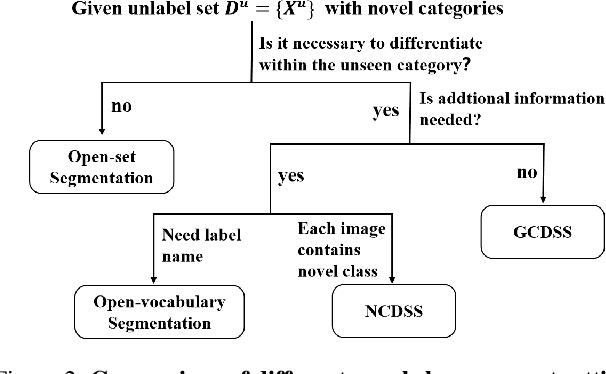

This paper explores a novel setting called Generalized Category Discovery in Semantic Segmentation (GCDSS), aiming to segment unlabeled images given prior knowledge from a labeled set of base classes. The unlabeled images contain pixels of the base class or novel class. In contrast to Novel Category Discovery in Semantic Segmentation (NCDSS), there is no prerequisite for prior knowledge mandating the existence of at least one novel class in each unlabeled image. Besides, we broaden the segmentation scope beyond foreground objects to include the entire image. Existing NCDSS methods rely on the aforementioned priors, making them challenging to truly apply in real-world situations. We propose a straightforward yet effective framework that reinterprets the GCDSS challenge as a task of mask classification. Additionally, we construct a baseline method and introduce the Neighborhood Relations-Guided Mask Clustering Algorithm (NeRG-MaskCA) for mask categorization to address the fragmentation in semantic representation. A benchmark dataset, Cityscapes-GCD, derived from the Cityscapes dataset, is established to evaluate the GCDSS framework. Our method demonstrates the feasibility of the GCDSS problem and the potential for discovering and segmenting novel object classes in unlabeled images. We employ the generated pseudo-labels from our approach as ground truth to supervise the training of other models, thereby enabling them with the ability to segment novel classes. It paves the way for further research in generalized category discovery, broadening the horizons of semantic segmentation and its applications. For details, please visit https://github.com/JethroPeng/GCDSS