 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Self-supervised Contrastive Learning Method for Grasp Outcomes Prediction
Jun 26, 2023

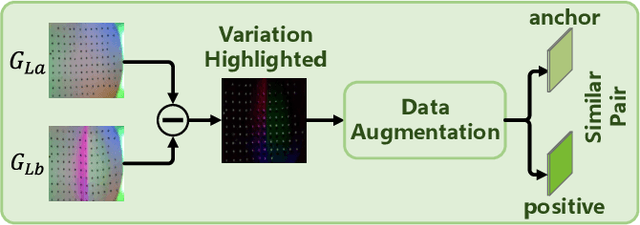
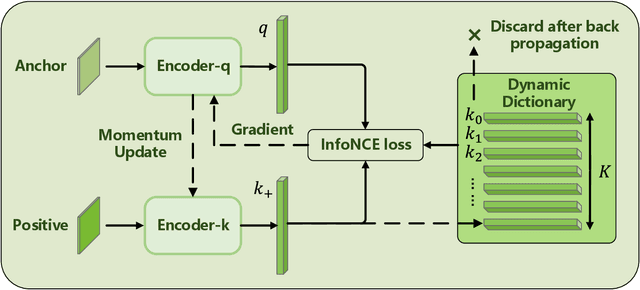
In this paper, we investigate the effectiveness of contrastive learning methods for predicting grasp outcomes in an unsupervised manner. By utilizing a publicly available dataset, we demonstrate that contrastive learning methods perform well on the task of grasp outcomes prediction. Specifically, the dynamic-dictionary-based method with the momentum updating technique achieves a satisfactory accuracy of 81.83% using data from one single tactile sensor, outperforming other unsupervised methods. Our results reveal the potential of contrastive learning methods for applications in the field of robot grasping and highlight the importance of accurate grasp prediction for achieving stable grasps.
Anti-drift in electronic nose via dimensionality reduction: a discriminative subspace projection approach
Dec 14, 2018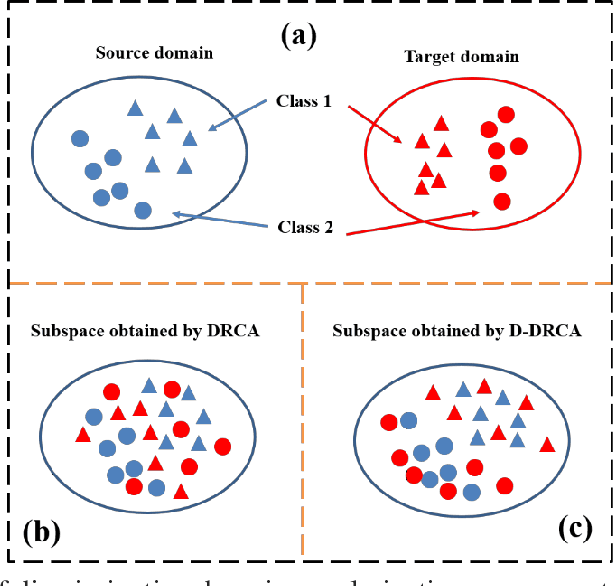



Sensor drift is a well-known issue in the field of sensors and measurement and has plagued the sensor community for many years. In this paper, we propose a sensor drift correction method to deal with the sensor drift problem. Specifically, we propose a discriminative subspace projection approach for sensor drift reduction in electronic noses. The proposed method inherits the merits of the subspace projection method called domain regularized component analysis. Moreover, the proposed method takes the source data label information into consideration, which minimizes the within-class variance of the projected source samples and at the same time maximizes the between-class variance. The label information is exploited to avoid overlapping of samples with different labels in the subspace. Experiments on two sensor drift datasets have shown the effectiveness of the proposed approach.