Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Self-supervised Contrastive Learning Method for Grasp Outcomes Prediction
Paper and Code
Jun 26, 2023

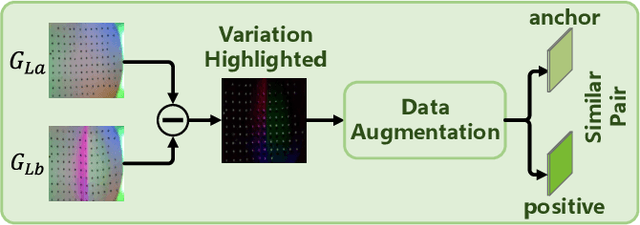
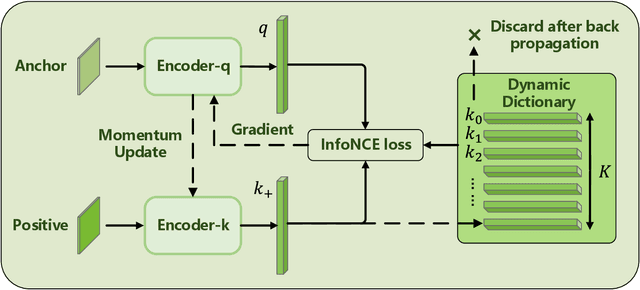
In this paper, we investigate the effectiveness of contrastive learning methods for predicting grasp outcomes in an unsupervised manner. By utilizing a publicly available dataset, we demonstrate that contrastive learning methods perform well on the task of grasp outcomes prediction. Specifically, the dynamic-dictionary-based method with the momentum updating technique achieves a satisfactory accuracy of 81.83% using data from one single tactile sensor, outperforming other unsupervised methods. Our results reveal the potential of contrastive learning methods for applications in the field of robot grasping and highlight the importance of accurate grasp prediction for achieving stable grasps.
* Manuscript accepted to RCAR 2023
View paper on