 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNestGNN: A Graph Neural Network Framework Generalizing the Nested Logit Model for Travel Mode Choice
Sep 08, 2025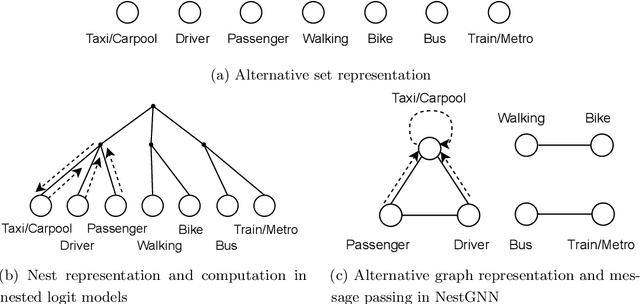
Nested logit (NL) has been commonly used for discrete choice analysis, including a wide range of applications such as travel mode choice, automobile ownership, or location decisions. However, the classical NL models are restricted by their limited representation capability and handcrafted utility specification. While researchers introduced deep neural networks (DNNs) to tackle such challenges, the existing DNNs cannot explicitly capture inter-alternative correlations in the discrete choice context. To address the challenges, this study proposes a novel concept - alternative graph - to represent the relationships among travel mode alternatives. Using a nested alternative graph, this study further designs a nested-utility graph neural network (NestGNN) as a generalization of the classical NL model in the neural network family. Theoretically, NestGNNs generalize the classical NL models and existing DNNs in terms of model representation, while retaining the crucial two-layer substitution patterns of the NL models: proportional substitution within a nest but non-proportional substitution beyond a nest. Empirically, we find that the NestGNNs significantly outperform the benchmark models, particularly the corresponding NL models by 9.2\%. As shown by elasticity tables and substitution visualization, NestGNNs retain the two-layer substitution patterns as the NL model, and yet presents more flexibility in its model design space. Overall, our study demonstrates the power of NestGNN in prediction, interpretation, and its flexibility of generalizing the classical NL model for analyzing travel mode choice.
Traffic State Estimation with Anisotropic Gaussian Processes from Vehicle Trajectories
Mar 04, 2023



Accurately monitoring road traffic state and speed is crucial for various applications, including travel time prediction, traffic control, and traffic safety. However, the lack of sensors often results in incomplete traffic state data, making it challenging to obtain reliable information for decision-making. This paper proposes a novel method for imputing traffic state data using Gaussian processes (GP) to address this issue. We propose a kernel rotation re-parametrization scheme that transforms a standard isotropic GP kernel into an anisotropic kernel, which can better model the propagation of traffic waves in traffic flow data. This method can be applied to impute traffic state data from fixed sensors or probe vehicles. Moreover, the rotated GP method provides statistical uncertainty quantification for the imputed traffic state, making it more reliable. We also extend our approach to a multi-output GP, which allows for simultaneously estimating the traffic state for multiple lanes. We evaluate our method using real-world traffic data from the Next Generation simulation (NGSIM) and HighD programs. Considering current and future mixed traffic of connected vehicles (CVs) and human-driven vehicles (HVs), we experiment with the traffic state estimation scheme from 5% to 50% available trajectories, mimicking different CV penetration rates in a mixed traffic environment. Results show that our method outperforms state-of-the-art methods in terms of estimation accuracy, efficiency, and robustness.
Laplacian Convolutional Representation for Traffic Time Series Imputation
Dec 18, 2022Spatiotemporal traffic data imputation is of great significance in intelligent transportation systems and data-driven decision-making processes. To make an accurate reconstruction from partially observed traffic data, we assert the importance of characterizing both global and local trends in traffic time series. In the literature, substantial prior works have demonstrated the effectiveness of utilizing low-rankness property of traffic data by matrix/tensor completion models. In this study, we first introduce a Laplacian kernel to temporal regularization for characterizing local trends in traffic time series, which can be formulated in the form of circular convolution. Then, we develop a low-rank Laplacian convolutional representation (LCR) model by putting the nuclear norm of a circulant matrix and the Laplacian temporal regularization together, which is proved to meet a unified framework that takes a fast Fourier transform (FFT) solution in a relatively low time complexity. Through extensive experiments on some traffic datasets, we demonstrate the superiority of LCR for imputing traffic time series of various time series behaviors (e.g., data noises and strong/weak periodicity). The proposed LCR model is an efficient and effective solution to large-scale traffic data imputation over the existing baseline models. Despite the LCR's application to time series data, the key modeling idea lies in bridging the low-rank models and the Laplacian regularization through FFT, which is also applicable to image inpainting. The adapted datasets and Python implementation are publicly available at https://github.com/xinychen/transdim.
Individual Mobility Prediction via Attentive Marked Temporal Point Processes
Sep 06, 2021



Individual mobility prediction is an essential task for transportation demand management and traffic system operation. There exist a large body of works on modeling location sequence and predicting the next location of users; however, little attention is paid to the prediction of the next trip, which is governed by the strong spatiotemporal dependencies between diverse attributes, including trip start time $t$, origin $o$, and destination $d$. To fill this gap, in this paper we propose a novel point process-based model -- Attentive Marked temporal point processes (AMTPP) -- to model human mobility and predict the whole trip $(t,o,d)$ in a joint manner. To encode the influence of history trips, AMTPP employs the self-attention mechanism with a carefully designed positional embedding to capture the daily/weekly periodicity and regularity in individual travel behavior. Given the unique peaked nature of inter-event time in human behavior, we use an asymmetric log-Laplace mixture distribution to precisely model the distribution of trip start time $t$. Furthermore, an origin-destination (OD) matrix learning block is developed to model the relationship between every origin and destination pair. Experimental results on two large metro trip datasets demonstrate the superior performance of AMTPP.