 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTGA: Selective-Training Gaussian Head Avatars
Mar 07, 2025We propose selective-training Gaussian head avatars (STGA) to enhance the details of dynamic head Gaussian. The dynamic head Gaussian model is trained based on the FLAME parameterized model. Each Gaussian splat is embedded within the FLAME mesh to achieve mesh-based animation of the Gaussian model. Before training, our selection strategy calculates the 3D Gaussian splat to be optimized in each frame. The parameters of these 3D Gaussian splats are optimized in the training of each frame, while those of the other splats are frozen. This means that the splats participating in the optimization process differ in each frame, to improve the realism of fine details. Compared with network-based methods, our method achieves better results with shorter training time. Compared with mesh-based methods, our method produces more realistic details within the same training time. Additionally, the ablation experiment confirms that our method effectively enhances the quality of details.
Motion Generation Review: Exploring Deep Learning for Lifelike Animation with Manifold
Dec 12, 2024

Human motion generation involves creating natural sequences of human body poses, widely used in gaming, virtual reality, and human-computer interaction. It aims to produce lifelike virtual characters with realistic movements, enhancing virtual agents and immersive experiences. While previous work has focused on motion generation based on signals like movement, music, text, or scene background, the complexity of human motion and its relationships with these signals often results in unsatisfactory outputs. Manifold learning offers a solution by reducing data dimensionality and capturing subspaces of effective motion. In this review, we present a comprehensive overview of manifold applications in human motion generation, one of the first in this domain. We explore methods for extracting manifolds from unstructured data, their application in motion generation, and discuss their advantages and future directions. This survey aims to provide a broad perspective on the field and stimulate new approaches to ongoing challenges.
Emergency Caching: Coded Caching-based Reliable Map Transmission in Emergency Networks
Feb 27, 2024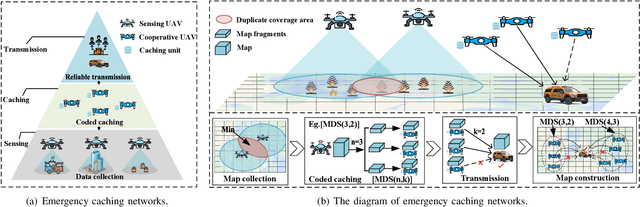
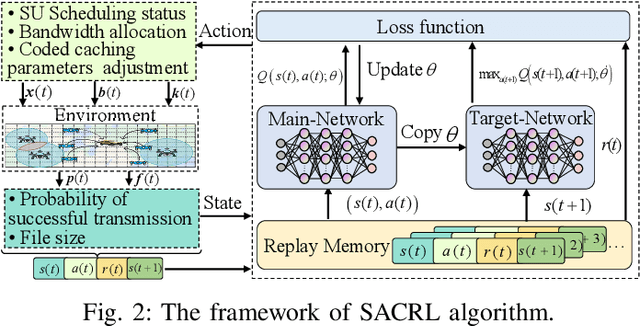
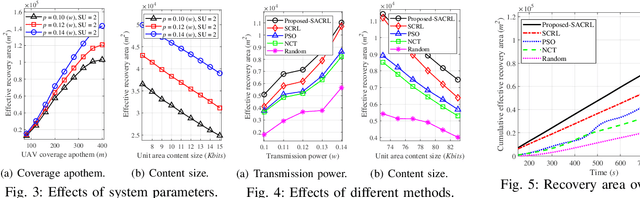
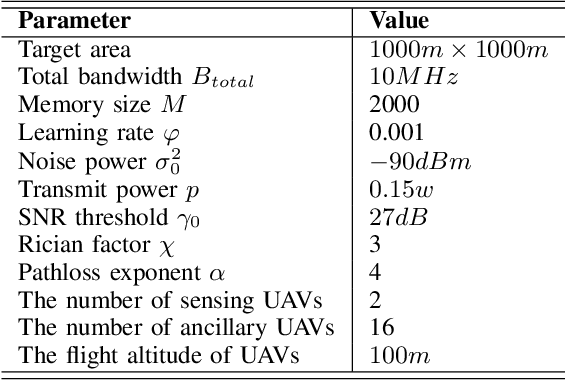
Many rescue missions demand effective perception and real-time decision making, which highly rely on effective data collection and processing. In this study, we propose a three-layer architecture of emergency caching networks focusing on data collection and reliable transmission, by leveraging efficient perception and edge caching technologies. Based on this architecture, we propose a disaster map collection framework that integrates coded caching technologies. Our framework strategically caches coded fragments of maps across unmanned aerial vehicles (UAVs), fostering collaborative uploading for augmented transmission reliability. Additionally, we establish a comprehensive probability model to assess the effective recovery area of disaster maps. Towards the goal of utility maximization, we propose a deep reinforcement learning (DRL) based algorithm that jointly makes decisions about cooperative UAVs selection, bandwidth allocation and coded caching parameter adjustment, accommodating the real-time map updates in a dynamic disaster situation. Our proposed scheme is more effective than the non-coding caching scheme, as validated by simulation.