 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMARS: Radio Map Super-resolution and Reconstruction Method under Sparse Channel Measurements
Jun 06, 2025Radio maps reflect the spatial distribution of signal strength and are essential for applications like smart cities, IoT, and wireless network planning. However, reconstructing accurate radio maps from sparse measurements remains challenging. Traditional interpolation and inpainting methods lack environmental awareness, while many deep learning approaches depend on detailed scene data, limiting generalization. To address this, we propose MARS, a Multi-scale Aware Radiomap Super-resolution method that combines CNNs and Transformers with multi-scale feature fusion and residual connections. MARS focuses on both global and local feature extraction, enhancing feature representation across different receptive fields and improving reconstruction accuracy. Experiments across different scenes and antenna locations show that MARS outperforms baseline models in both MSE and SSIM, while maintaining low computational cost, demonstrating strong practical potential.
DULRTC-RME: A Deep Unrolled Low-rank Tensor Completion Network for Radio Map Estimation
Feb 07, 2025



Radio maps enrich radio propagation and spectrum occupancy information, which provides fundamental support for the operation and optimization of wireless communication systems. Traditional radio maps are mainly achieved by extensive manual channel measurements, which is time-consuming and inefficient. To reduce the complexity of channel measurements, radio map estimation (RME) through novel artificial intelligence techniques has emerged to attain higher resolution radio maps from sparse measurements or few observations. However, black box problems and strong dependency on training data make learning-based methods less explainable, while model-based methods offer strong theoretical grounding but perform inferior to the learning-based methods. In this paper, we develop a deep unrolled low-rank tensor completion network (DULRTC-RME) for radio map estimation, which integrates theoretical interpretability and learning ability by unrolling the tedious low-rank tensor completion optimization into a deep network. It is the first time that algorithm unrolling technology has been used in the RME field. Experimental results demonstrate that DULRTC-RME outperforms existing RME methods.
RemoteDet-Mamba: A Hybrid Mamba-CNN Network for Multi-modal Object Detection in Remote Sensing Images
Oct 17, 2024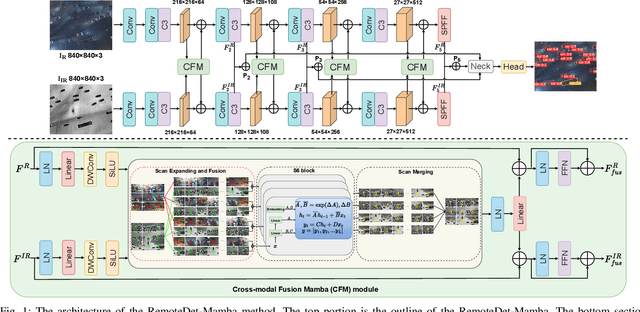
Unmanned aerial vehicle (UAV) remote sensing is widely applied in fields such as emergency response, owing to its advantages of rapid information acquisition and low cost. However, due to the effects of shooting distance and imaging mechanisms, the objects in the images present challenges such as small size, dense distribution, and low inter-class differentiation. To this end, we propose a multimodal remote sensing detection network that employs a quad-directional selective scanning fusion strategy called RemoteDet-Mamba. RemoteDet-Mamba simultaneously facilitates the learning of single-modal local features and the integration of patch-level global features across modalities, enhancing the distinguishability for small objects and utilizing local information to improve discrimination between different classes. Additionally, the use of Mamba's serial processing significantly increases detection speed. Experimental results on the DroneVehicle dataset demonstrate the effectiveness of RemoteDet-Mamba, which achieves superior detection accuracy compared to state-of-the-art methods while maintaining computational efficiency and parameter count.
Multimodal generative semantic communication based on latent diffusion model
Aug 10, 2024



In emergencies, the ability to quickly and accurately gather environmental data and command information, and to make timely decisions, is particularly critical. Traditional semantic communication frameworks, primarily based on a single modality, are susceptible to complex environments and lighting conditions, thereby limiting decision accuracy. To this end, this paper introduces a multimodal generative semantic communication framework named mm-GESCO. The framework ingests streams of visible and infrared modal image data, generates fused semantic segmentation maps, and transmits them using a combination of one-hot encoding and zlib compression techniques to enhance data transmission efficiency. At the receiving end, the framework can reconstruct the original multimodal images based on the semantic maps. Additionally, a latent diffusion model based on contrastive learning is designed to align different modal data within the latent space, allowing mm-GESCO to reconstruct latent features of any modality presented at the input. Experimental results demonstrate that mm-GESCO achieves a compression ratio of up to 200 times, surpassing the performance of existing semantic communication frameworks and exhibiting excellent performance in downstream tasks such as object classification and detection.
Failure-Resilient Distributed Inference with Model Compression over Heterogeneous Edge Devices
Jun 20, 2024



The distributed inference paradigm enables the computation workload to be distributed across multiple devices, facilitating the implementations of deep learning based intelligent services on extremely resource-constrained Internet of Things (IoT) scenarios. Yet it raises great challenges to perform complicated inference tasks relying on a cluster of IoT devices that are heterogeneous in their computing/communication capacity and prone to crash or timeout failures. In this paper, we present RoCoIn, a robust cooperative inference mechanism for locally distributed execution of deep neural network-based inference tasks over heterogeneous edge devices. It creates a set of independent and compact student models that are learned from a large model using knowledge distillation for distributed deployment. In particular, the devices are strategically grouped to redundantly deploy and execute the same student model such that the inference process is resilient to any local failures, while a joint knowledge partition and student model assignment scheme are designed to minimize the response latency of the distributed inference system in the presence of devices with diverse capacities. Extensive simulations are conducted to corroborate the superior performance of our RoCoIn for distributed inference compared to several baselines, and the results demonstrate its efficacy in timely inference and failure resiliency.
Emergency Caching: Coded Caching-based Reliable Map Transmission in Emergency Networks
Feb 27, 2024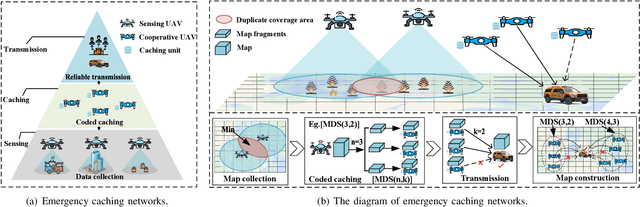
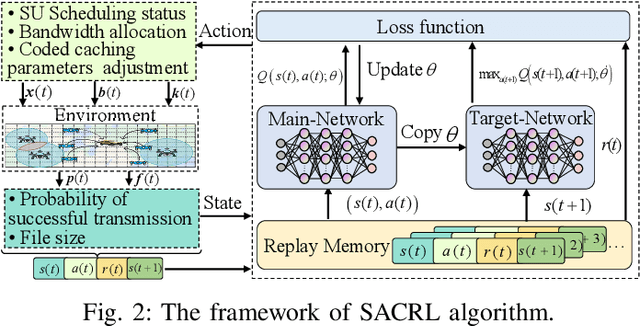
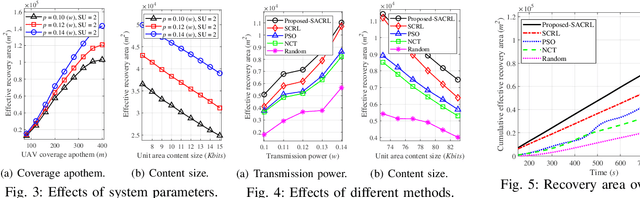
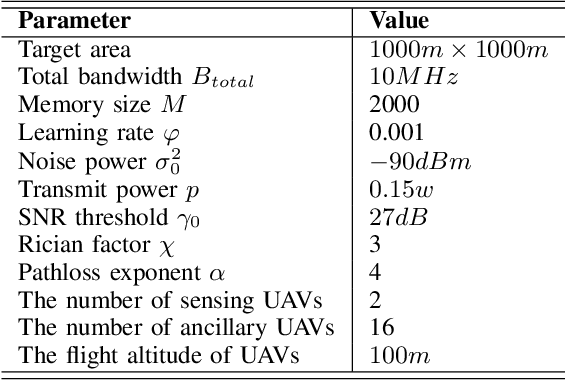
Many rescue missions demand effective perception and real-time decision making, which highly rely on effective data collection and processing. In this study, we propose a three-layer architecture of emergency caching networks focusing on data collection and reliable transmission, by leveraging efficient perception and edge caching technologies. Based on this architecture, we propose a disaster map collection framework that integrates coded caching technologies. Our framework strategically caches coded fragments of maps across unmanned aerial vehicles (UAVs), fostering collaborative uploading for augmented transmission reliability. Additionally, we establish a comprehensive probability model to assess the effective recovery area of disaster maps. Towards the goal of utility maximization, we propose a deep reinforcement learning (DRL) based algorithm that jointly makes decisions about cooperative UAVs selection, bandwidth allocation and coded caching parameter adjustment, accommodating the real-time map updates in a dynamic disaster situation. Our proposed scheme is more effective than the non-coding caching scheme, as validated by simulation.
Emergency Computing: An Adaptive Collaborative Inference Method Based on Hierarchical Reinforcement Learning
Feb 03, 2024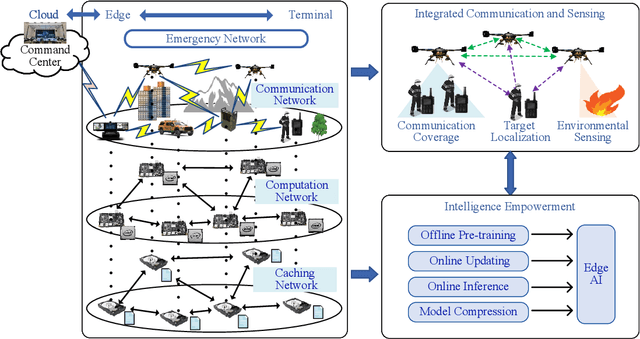
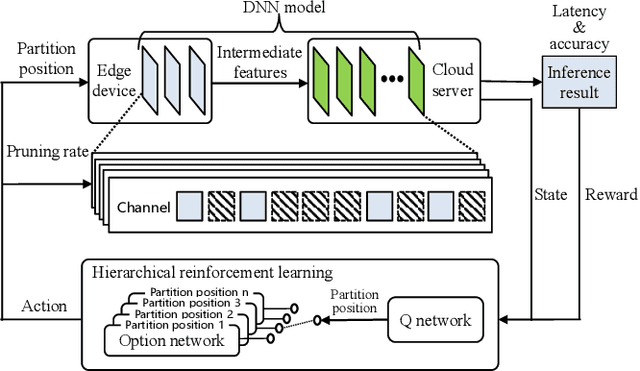
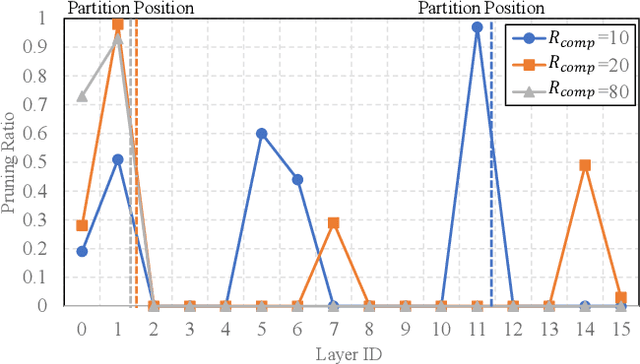
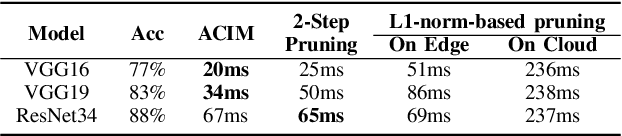
In achieving effective emergency response, the timely acquisition of environmental information, seamless command data transmission, and prompt decision-making are crucial. This necessitates the establishment of a resilient emergency communication dedicated network, capable of providing communication and sensing services even in the absence of basic infrastructure. In this paper, we propose an Emergency Network with Sensing, Communication, Computation, Caching, and Intelligence (E-SC3I). The framework incorporates mechanisms for emergency computing, caching, integrated communication and sensing, and intelligence empowerment. E-SC3I ensures rapid access to a large user base, reliable data transmission over unstable links, and dynamic network deployment in a changing environment. However, these advantages come at the cost of significant computation overhead. Therefore, we specifically concentrate on emergency computing and propose an adaptive collaborative inference method (ACIM) based on hierarchical reinforcement learning. Experimental results demonstrate our method's ability to achieve rapid inference of AI models with constrained computational and communication resources.
An Improved Virtual Force Approach for UAV Deployment and Resource Allocation in Emergency Communications
Jan 17, 2024In this paper, we consider an unmanned aerial vehicle (UAV)-enabled emergency communication system, which establishes temporary communication link with users equipment (UEs) in a typical disaster environment with mountainous forest and obstacles. Towards this end, a joint deployment, power allocation, and user association optimization problem is formulated to maximize the total transmission rate, while considering the demand of each UE and the disaster environment characteristics. Then, an alternating optimization algorithm is proposed by integrating coalition game and virtual force approach which captures the impact of the demand priority of UEs and the obstacles to the flight path and consumed power. Simulation results demonstrate that the computation time consumed by our proposed algorithm is only $5.6\%$ of the traditional heuristic algorithms, which validates its effectiveness in disaster scenarios.
UAV-assisted Emergency Integrated Sensing and Communication Networks: A CNN-based Rapid Deployment Approach
Jan 13, 2024UAV-assisted integrated sensing and communication (ISAC) network is crucial for post-disaster emergency rescue. The speed of UAV deployment will directly impact rescue results. However, the ISAC UAV deployment in emergency scenarios is difficult to solve, which contradicts the rapid deployment. In this paper, we propose a two-stage deployment framework to achieve rapid ISAC UAV deployment in emergency scenarios, which consists of an offline stage and an online stage. Specifically, in the offline stage, we first formulate the ISAC UAV deployment problem and define the ISAC utility as the objective function, which integrates communication rate and localization accuracy. Secondly, we develop a dynamic particle swarm optimization (DPSO) algorithm to construct an optimized UAV deployment dataset. Finally, we train a convolutional neural network (CNN) model with this dataset, which replaces the time-consuming DPSO algorithm. In the online stage, the trained CNN model can be used to make quick decisions for the ISAC UAV deployment. The simulation results indicate that the trained CNN model achieves superior ISAC performance compared to the classic particle swarm optimization algorithm. Additionally, it significantly reduces the deployment time by more than 96%.