 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-Based Leader Localization for Underwater Vehicles With Optical-Acoustic-Pressure Sensor Fusion
Feb 28, 2025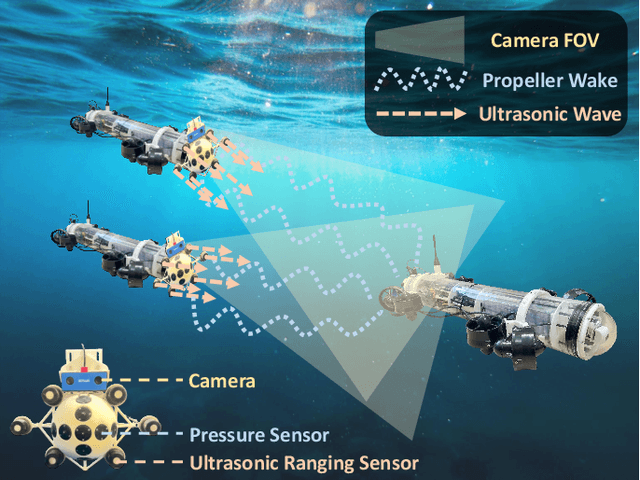
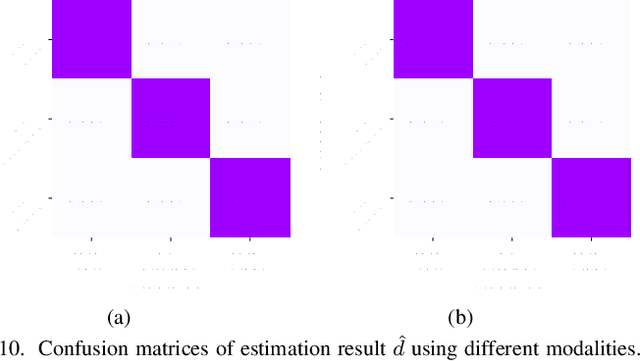
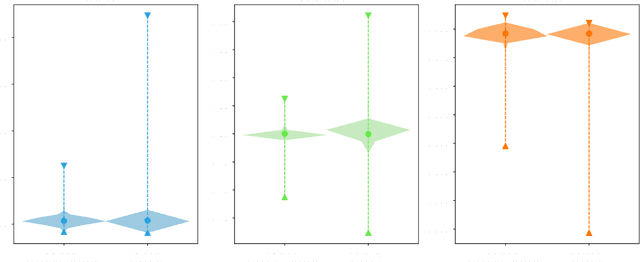
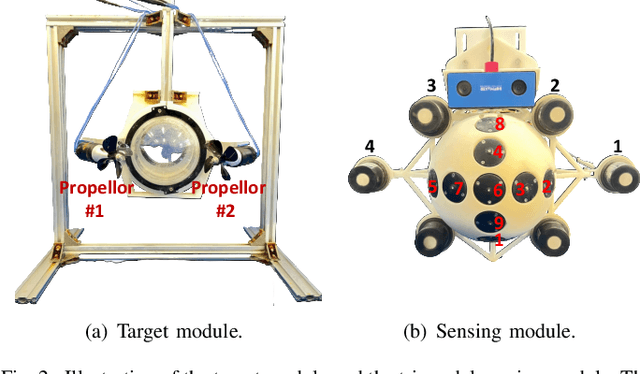
Underwater vehicles have emerged as a critical technology for exploring and monitoring aquatic environments. The deployment of multi-vehicle systems has gained substantial interest due to their capability to perform collaborative tasks with improved efficiency. However, achieving precise localization of a leader underwater vehicle within a multi-vehicle configuration remains a significant challenge, particularly in dynamic and complex underwater conditions. To address this issue, this paper presents a novel tri-modal sensor fusion neural network approach that integrates optical, acoustic, and pressure sensors to localize the leader vehicle. The proposed method leverages the unique strengths of each sensor modality to improve localization accuracy and robustness. Specifically, optical sensors provide high-resolution imaging for precise relative positioning, acoustic sensors enable long-range detection and ranging, and pressure sensors offer environmental context awareness. The fusion of these sensor modalities is implemented using a deep learning architecture designed to extract and combine complementary features from raw sensor data. The effectiveness of the proposed method is validated through a custom-designed testing platform. Extensive data collection and experimental evaluations demonstrate that the tri-modal approach significantly improves the accuracy and robustness of leader localization, outperforming both single-modal and dual-modal methods.
Adaptive Integral Sliding Mode Control for Attitude Tracking of Underwater Robots With Large Range Pitch Variations in Confined Space
May 01, 2024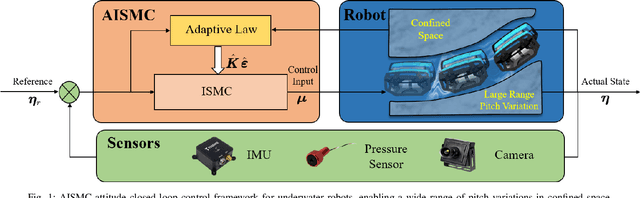
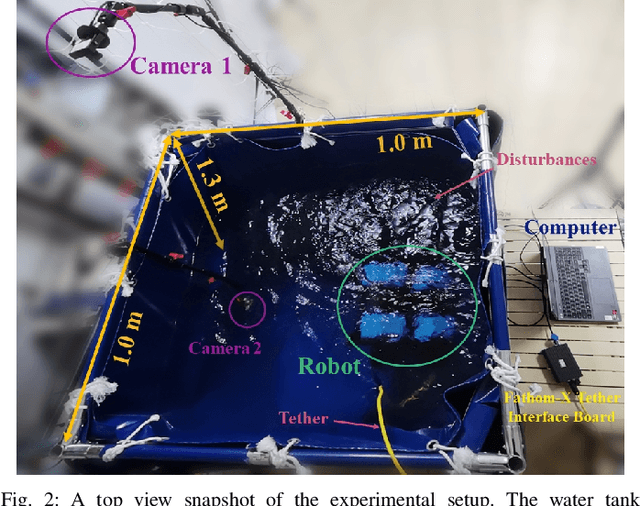
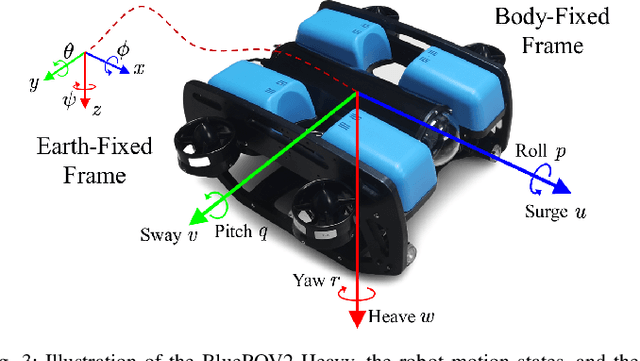

Underwater robots play a crucial role in exploring aquatic environments. The ability to flexibly adjust their attitudes is essential for underwater robots to effectively accomplish tasks in confined space. However, the highly coupled six degrees of freedom dynamics resulting from attitude changes and the complex turbulence within limited spatial areas present significant challenges. To address the problem of attitude control of underwater robots, this letter investigates large-range pitch angle tracking during station holding as well as simultaneous roll and yaw angle control to enable versatile attitude adjustments. Based on dynamic modeling, this letter proposes an adaptive integral sliding mode controller (AISMC) that integrates an integral module into traditional sliding mode control (SMC) and adaptively adjusts the switching gain for improved tracking accuracy, reduced chattering, and enhanced robustness. The stability of the closed-loop control system is established through Lyapunov analysis. Extensive experiments and comparison studies are conducted using a commercial remotely operated vehicle (ROV), the results of which demonstrate that AISMC achieves satisfactory performance in attitude tracking control in confined space with unknown disturbances, significantly outperforming both PID and SMC.
A Multi-Modal Approach Based on Large Vision Model for Close-Range Underwater Target Localization
Jan 09, 2024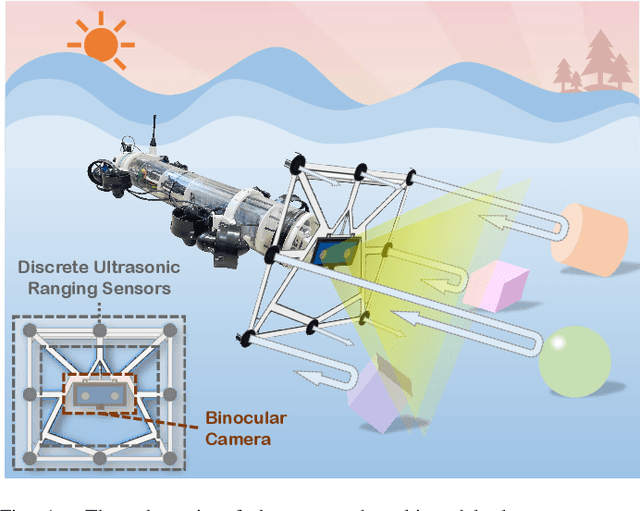
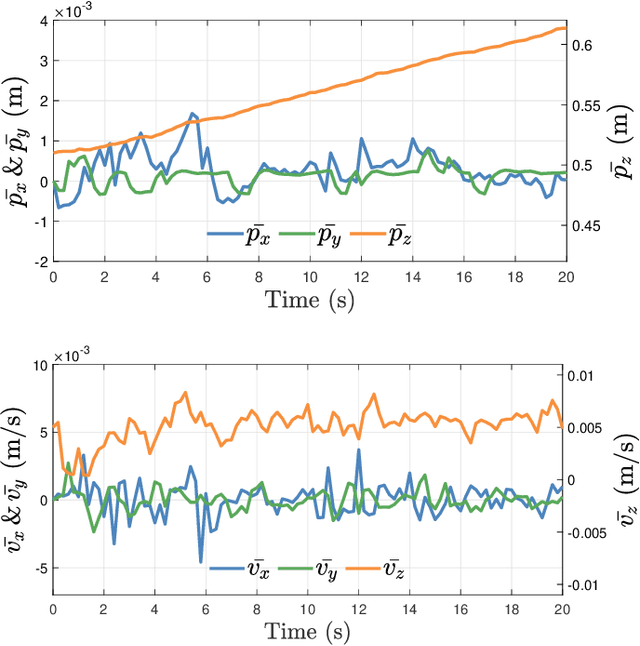
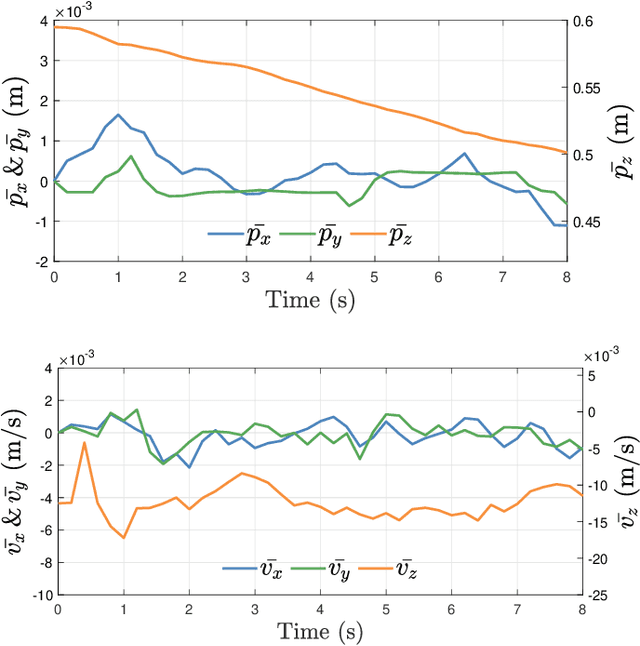
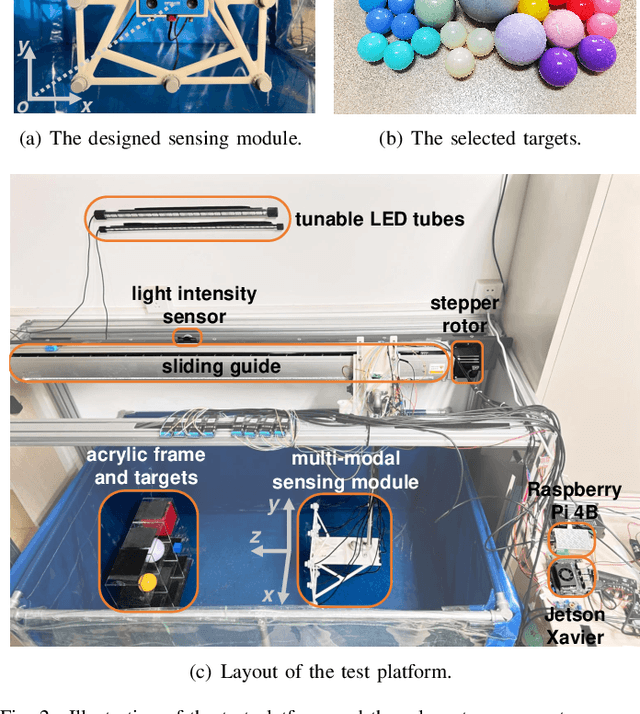
Underwater target localization uses real-time sensory measurements to estimate the position of underwater objects of interest, providing critical feedback information for underwater robots. While acoustic sensing is the most acknowledged method in underwater robots and possibly the only effective approach for long-range underwater target localization, such a sensing modality generally suffers from low resolution, high cost and high energy consumption, thus leading to a mediocre performance when applied to close-range underwater target localization. On the other hand, optical sensing has attracted increasing attention in the underwater robotics community for its advantages of high resolution and low cost, holding a great potential particularly in close-range underwater target localization. However, most existing studies in underwater optical sensing are restricted to specific types of targets due to the limited training data available. In addition, these studies typically focus on the design of estimation algorithms and ignore the influence of illumination conditions on the sensing performance, thus hindering wider applications in the real world. To address the aforementioned issues, this paper proposes a novel target localization method that assimilates both optical and acoustic sensory measurements to estimate the 3D positions of close-range underwater targets. A test platform with controllable illumination conditions is designed and developed to experimentally investigate the proposed multi-modal sensing approach. A large vision model is applied to process the optical imaging measurements, eliminating the requirement for training data acquisition, thus significantly expanding the scope of potential applications. Extensive experiments are conducted, the results of which validate the effectiveness of the proposed underwater target localization method.
RGBlimp: Robotic Gliding Blimp -- Design, Modeling, Development, and Aerodynamics Analysis
Jun 07, 2023A miniature robotic blimp, as one type of lighter-than-air aerial vehicle, has attracted increasing attention in the science and engineering field for its long flight duration and safe aerial locomotion. While a variety of miniature robotic blimps have been developed over the past decade, most of them utilize the buoyant lift and neglect the aerodynamic lift in their design, thus leading to a mediocre aerodynamic performance. This letter proposes a new design of miniature robotic blimp that combines desirable features of both a robotic blimp and a fixed-wing glider, named the Robotic Gliding Blimp, or RGBlimp. This robot, equipped with an envelope filled with helium and a pair of wings, uses an internal moving mass and a pair of propellers for its locomotion control. This letter presents the design, dynamic modeling, prototyping, and system identification of the RGBlimp. To the best of the authors' knowledge, this is the first effort to systematically design and develop such a miniature robotic blimp with hybrid lifts and moving mass control. Experimental results are presented to validate the design and the dynamic model of the RGBlimp. Analysis of the RGBlimp aerodynamics is conducted which confirms the performance improvement of the proposed RGBlimp in aerodynamic efficiency and flight stability.