 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging the Variance of Return Sequences for Exploration Policy
Nov 17, 2020
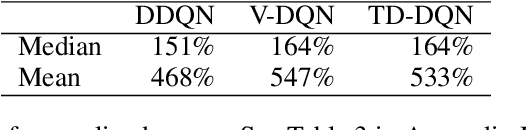
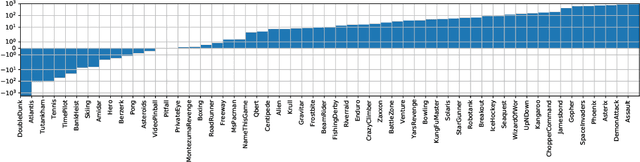
This paper introduces a method for constructing an upper bound for exploration policy using either the weighted variance of return sequences or the weighted temporal difference (TD) error. We demonstrate that the variance of the return sequence for a specific state-action pair is an important information source that can be leveraged to guide exploration in reinforcement learning. The intuition is that fluctuation in the return sequence indicates greater uncertainty in the near future returns. This divergence occurs because of the cyclic nature of value-based reinforcement learning; the evolving value function begets policy improvements which in turn modify the value function. Although both variance and TD errors capture different aspects of this uncertainty, our analysis shows that both can be valuable to guide exploration. We propose a two-stream network architecture to estimate weighted variance/TD errors within DQN agents for our exploration method and show that it outperforms the baseline on a wide range of Atari games.
PolarNet: An Improved Grid Representation for Online LiDAR Point Clouds Semantic Segmentation
Mar 31, 2020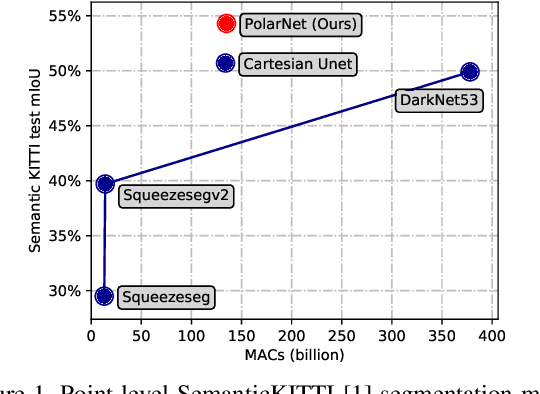

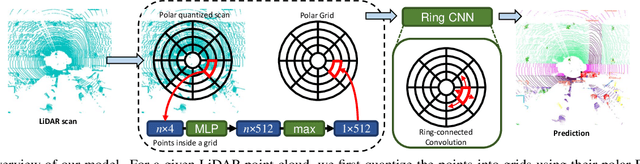
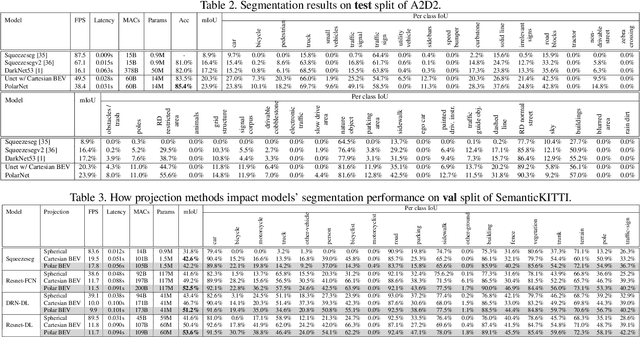
The requirement of fine-grained perception by autonomous driving systems has resulted in recently increased research in the online semantic segmentation of single-scan LiDAR. Emerging datasets and technological advancements have enabled researchers to benchmark this problem and improve the applicable semantic segmentation algorithms. Still, online semantic segmentation of LiDAR scans in autonomous driving applications remains challenging due to three reasons: (1) the need for near-real-time latency with limited hardware, (2) points are distributed unevenly across space, and (3) an increasing number of more fine-grained semantic classes. The combination of the aforementioned challenges motivates us to propose a new LiDAR-specific, KNN-free segmentation algorithm - PolarNet. Instead of using common spherical or bird's-eye-view projection, our polar bird's-eye-view representation balances the points per grid and thus indirectly redistributes the network's attention over the long-tailed points distribution over the radial axis in polar coordination. We find that our encoding scheme greatly increases the mIoU in three drastically different real urban LiDAR single-scan segmentation datasets while retaining ultra low latency and near real-time throughput.
metricDTW: local distance metric learning in Dynamic Time Warping
Jun 11, 2016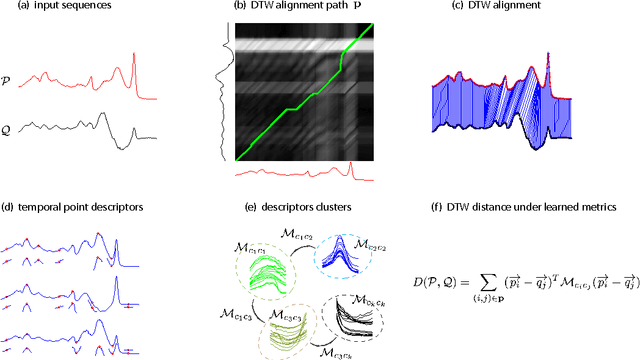
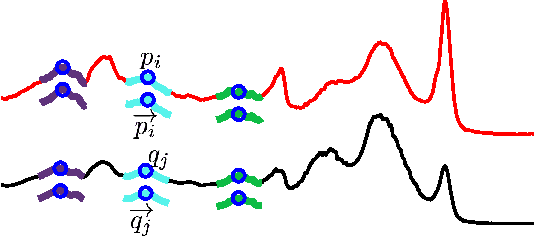
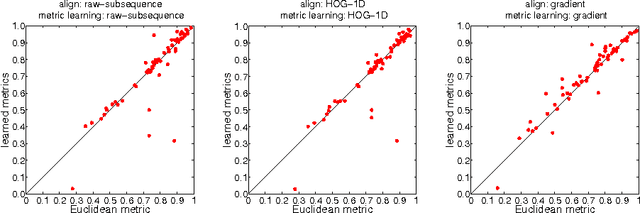
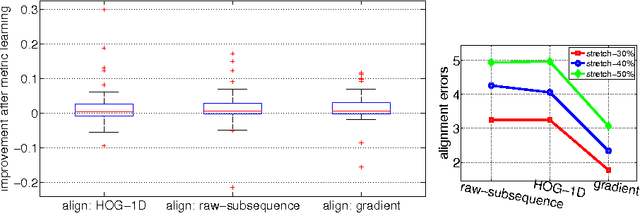
We propose to learn multiple local Mahalanobis distance metrics to perform k-nearest neighbor (kNN) classification of temporal sequences. Temporal sequences are first aligned by dynamic time warping (DTW); given the alignment path, similarity between two sequences is measured by the DTW distance, which is computed as the accumulated distance between matched temporal point pairs along the alignment path. Traditionally, Euclidean metric is used for distance computation between matched pairs, which ignores the data regularities and might not be optimal for applications at hand. Here we propose to learn multiple Mahalanobis metrics, such that DTW distance becomes the sum of Mahalanobis distances. We adapt the large margin nearest neighbor (LMNN) framework to our case, and formulate multiple metric learning as a linear programming problem. Extensive sequence classification results show that our proposed multiple metrics learning approach is effective, insensitive to the preceding alignment qualities, and reaches the state-of-the-art performances on UCR time series datasets.