 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolarNet: An Improved Grid Representation for Online LiDAR Point Clouds Semantic Segmentation
Mar 31, 2020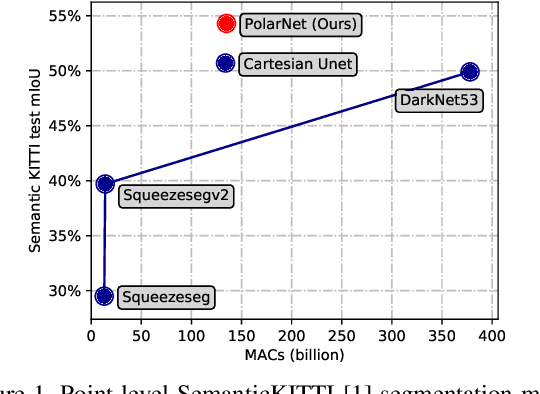

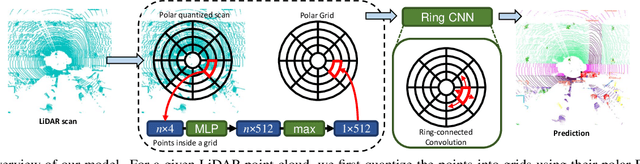
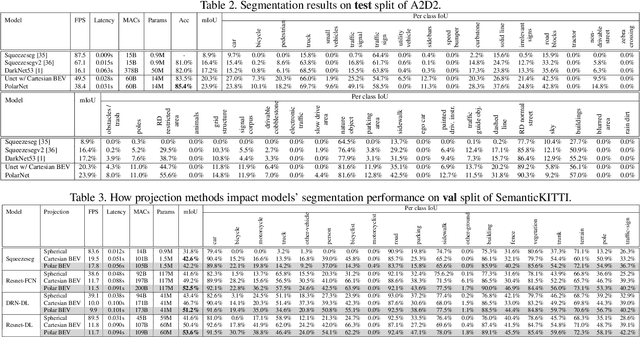
The requirement of fine-grained perception by autonomous driving systems has resulted in recently increased research in the online semantic segmentation of single-scan LiDAR. Emerging datasets and technological advancements have enabled researchers to benchmark this problem and improve the applicable semantic segmentation algorithms. Still, online semantic segmentation of LiDAR scans in autonomous driving applications remains challenging due to three reasons: (1) the need for near-real-time latency with limited hardware, (2) points are distributed unevenly across space, and (3) an increasing number of more fine-grained semantic classes. The combination of the aforementioned challenges motivates us to propose a new LiDAR-specific, KNN-free segmentation algorithm - PolarNet. Instead of using common spherical or bird's-eye-view projection, our polar bird's-eye-view representation balances the points per grid and thus indirectly redistributes the network's attention over the long-tailed points distribution over the radial axis in polar coordination. We find that our encoding scheme greatly increases the mIoU in three drastically different real urban LiDAR single-scan segmentation datasets while retaining ultra low latency and near real-time throughput.
A Curriculum Domain Adaptation Approach to the Semantic Segmentation of Urban Scenes
Jan 10, 2019


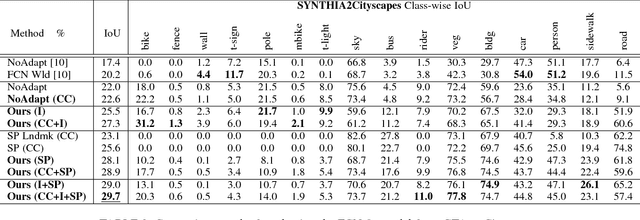
During the last half decade, convolutional neural networks (CNNs) have triumphed over semantic segmentation, which is one of the core tasks in many applications such as autonomous driving and augmented reality. However, to train CNNs requires a considerable amount of data, which is difficult to collect and laborious to annotate. Recent advances in computer graphics make it possible to train CNNs on photo-realistic synthetic imagery with computer-generated annotations. Despite this, the domain mismatch between the real images and the synthetic data hinders the models' performance. Hence, we propose a curriculum-style learning approach to minimizing the domain gap in urban scene semantic segmentation. The curriculum domain adaptation solves easy tasks first to infer necessary properties about the target domain; in particular, the first task is to learn global label distributions over images and local distributions over landmark superpixels. These are easy to estimate because images of urban scenes have strong idiosyncrasies (e.g., the size and spatial relations of buildings, streets, cars, etc.). We then train a segmentation network, while regularizing its predictions in the target domain to follow those inferred properties. In experiments, our method outperforms the baselines on two datasets and two backbone networks. We also report extensive ablation studies about our approach.
Curriculum Domain Adaptation for Semantic Segmentation of Urban Scenes
Oct 19, 2018



During the last half decade, convolutional neural networks (CNNs) have triumphed over semantic segmentation, which is one of the core tasks in many applications such as autonomous driving. However, to train CNNs requires a considerable amount of data, which is difficult to collect and laborious to annotate. Recent advances in computer graphics make it possible to train CNNs on photo-realistic synthetic imagery with computer-generated annotations. Despite this, the domain mismatch between the real images and the synthetic data cripples the models' performance. Hence, we propose a curriculum-style learning approach to minimize the domain gap in urban scenery semantic segmentation. The curriculum domain adaptation solves easy tasks first to infer necessary properties about the target domain; in particular, the first task is to learn global label distributions over images and local distributions over landmark superpixels. These are easy to estimate because images of urban scenes have strong idiosyncrasies (e.g., the size and spatial relations of buildings, streets, cars, etc.). We then train a segmentation network while regularizing its predictions in the target domain to follow those inferred properties. In experiments, our method outperforms the baselines on two datasets and two backbone networks. We also report extensive ablation studies about our approach.