 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End 3D Hand Pose Estimation from Stereo Cameras
Jun 03, 2022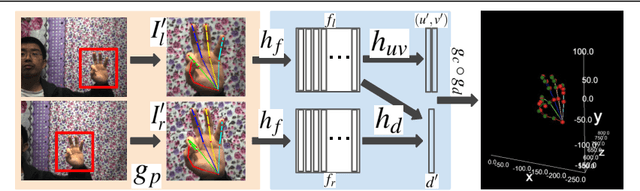
This work proposes an end-to-end approach to estimate full 3D hand pose from stereo cameras. Most existing methods of estimating hand pose from stereo cameras apply stereo matching to obtain depth map and use depth-based solution to estimate hand pose. In contrast, we propose to bypass the stereo matching and directly estimate the 3D hand pose from the stereo image pairs. The proposed neural network architecture extends from any keypoint predictor to estimate the sparse disparity of the hand joints. In order to effectively train the model, we propose a large scale synthetic dataset that is composed of stereo image pairs and ground truth 3D hand pose annotations. Experiments show that the proposed approach outperforms the existing methods based on the stereo depth.
3D Hand Shape and Pose Estimation from a Single RGB Image
Mar 03, 2019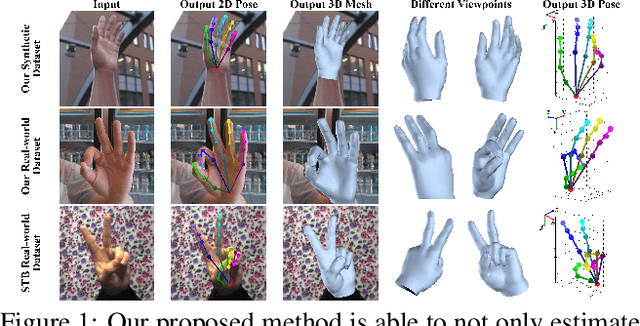

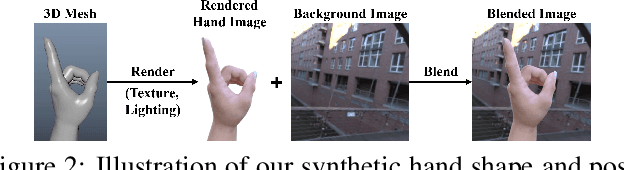
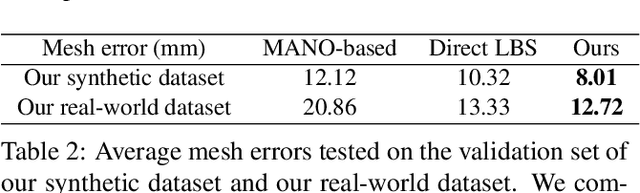
This work addresses a novel and challenging problem of estimating the full 3D hand shape and pose from a single RGB image. Most current methods in 3D hand analysis from monocular RGB images only focus on estimating the 3D locations of hand keypoints, which cannot fully express the 3D shape of hand. In contrast, we propose a Graph Convolutional Neural Network (Graph CNN) based method to reconstruct a full 3D mesh of hand surface that contains richer information of both 3D hand shape and pose. To train networks with full supervision, we create a large-scale synthetic dataset containing both ground truth 3D meshes and 3D poses. When fine-tuning the networks on real-world datasets without 3D ground truth, we propose a weakly-supervised approach by leveraging the depth map as a weak supervision in training. Through extensive evaluations on our proposed new datasets and two public datasets, we show that our proposed method can produce accurate and reasonable 3D hand mesh, and can achieve superior 3D hand pose estimation accuracy when compared with state-of-the-art methods.