 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYOLO-Ant: A Lightweight Detector via Depthwise Separable Convolutional and Large Kernel Design for Antenna Interference Source Detection
Feb 20, 2024In the era of 5G communication, removing interference sources that affect communication is a resource-intensive task. The rapid development of computer vision has enabled unmanned aerial vehicles to perform various high-altitude detection tasks. Because the field of object detection for antenna interference sources has not been fully explored, this industry lacks dedicated learning samples and detection models for this specific task. In this article, an antenna dataset is created to address important antenna interference source detection issues and serves as the basis for subsequent research. We introduce YOLO-Ant, a lightweight CNN and transformer hybrid detector specifically designed for antenna interference source detection. Specifically, we initially formulated a lightweight design for the network depth and width, ensuring that subsequent investigations were conducted within a lightweight framework. Then, we propose a DSLK-Block module based on depthwise separable convolution and large convolution kernels to enhance the network's feature extraction ability, effectively improving small object detection. To address challenges such as complex backgrounds and large interclass differences in antenna detection, we construct DSLKVit-Block, a powerful feature extraction module that combines DSLK-Block and transformer structures. Considering both its lightweight design and accuracy, our method not only achieves optimal performance on the antenna dataset but also yields competitive results on public datasets.
Fast Rigid 3D Registration Solution: A Simple Method Free of SVD and Eigen-Decomposition
Jul 02, 2018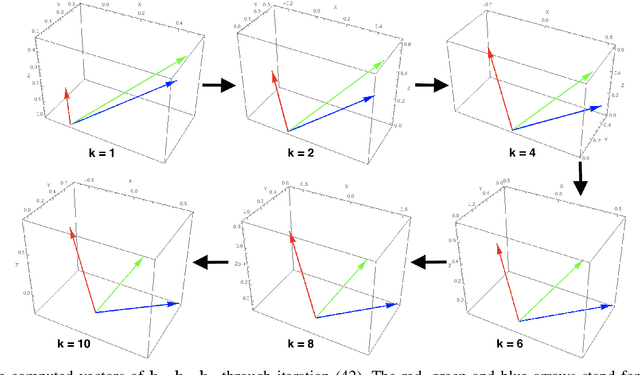

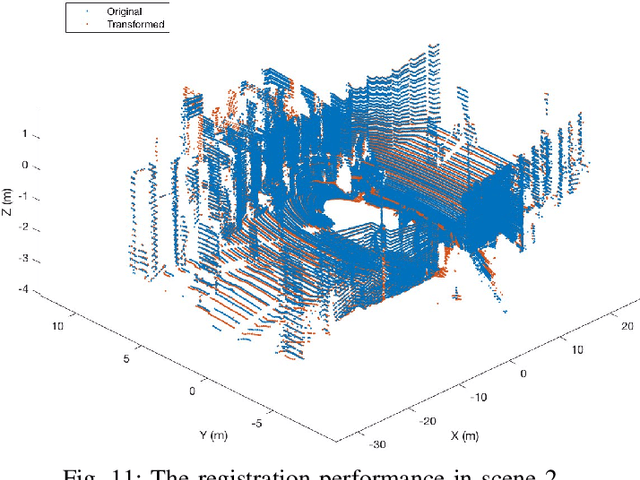
A novel solution is obtained to solve the rigid 3D registration problem, motivated by previous eigen-decomposition approaches. Different from existing solvers, the proposed algorithm does not require sophisticated matrix operations e.g. singular value decomposition or eigenvalue decomposition. Instead, the optimal eigenvector of the point cross-covariance matrix can be computed within several iterations. It is also proven that the optimal rotation matrix can be directly computed for cases without need of quaternion. The simple framework provides very easy approach of integer-implementation on embedded platforms. Simulations on noise-corrupted point clouds have verified the robustness and computation speed of the proposed method. The final results indicate that the proposed algorithm is accurate, robust and owns over $60\% \sim 80\%$ less computation time than representatives. It has also been applied to real-world applications for faster relative robotic navigation.
Fast Symbolic 3D Registration Solution
May 12, 2018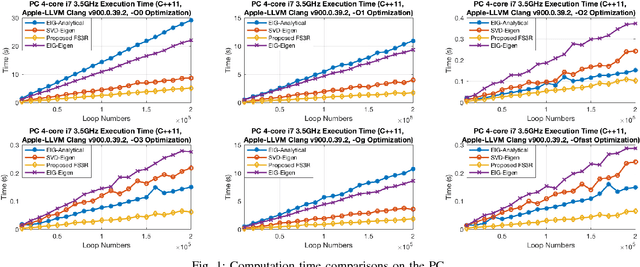

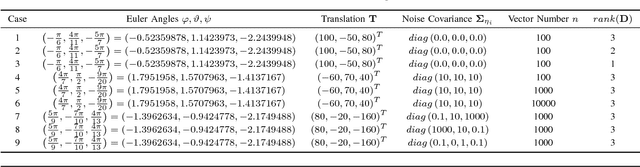
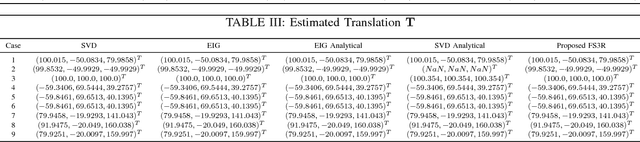
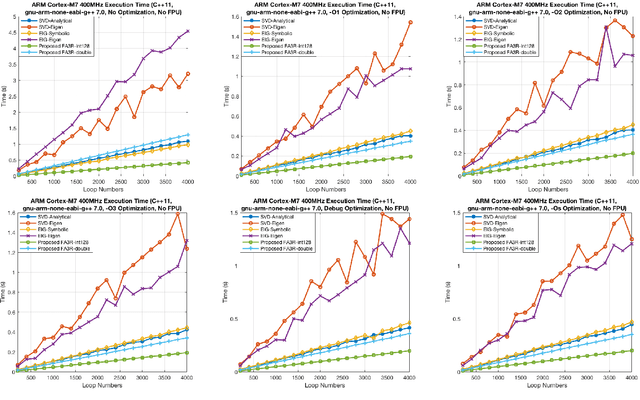
3D registration has always been performed invoking singular value decomposition (SVD) or eigenvalue decomposition (EIG) in real engineering practices. However, numerical algorithms suffer from uncertainty of convergence in many cases. A novel fast symbolic solution is proposed in this paper by following our recent publication in this journal. The equivalence analysis shows that our previous solver can be converted to deal with the 3D registration problem. Rather, the computation procedure is studied for further simplification of computing without complex numbers support. Experimental results show that the proposed solver does not loose accuracy and robustness but improves the execution speed to a large extent by almost \%50 to \%80, on both personal computer and embedded processor.