 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Reinforcement Learning for Adaptive User Association in Dynamic mmWave Networks
Jun 16, 2020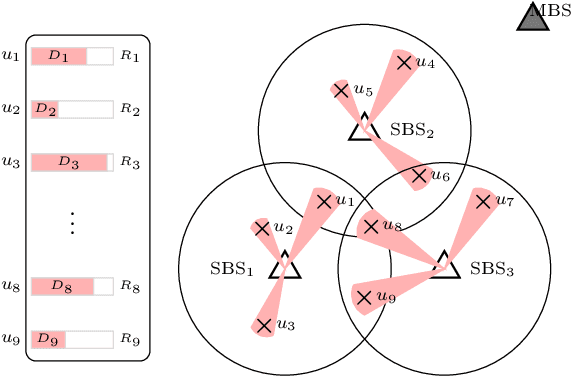
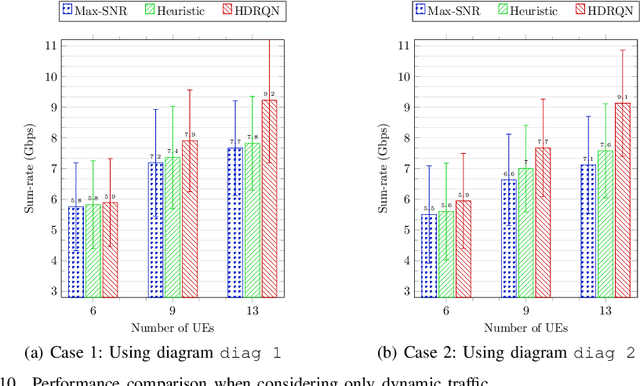
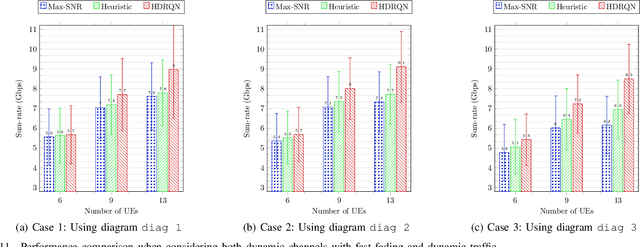
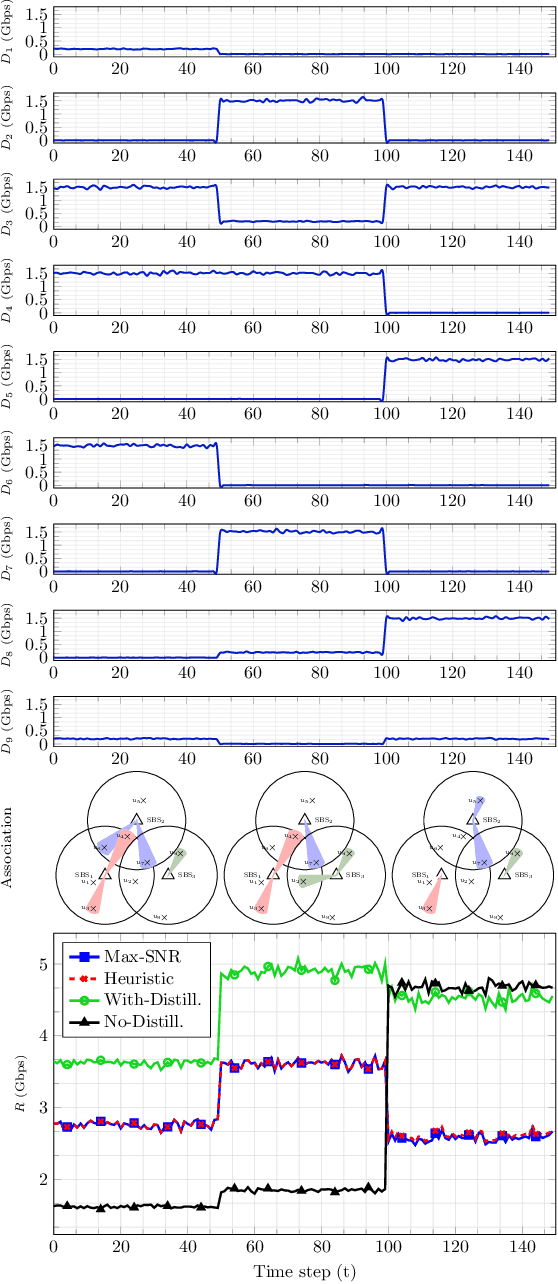
Network densification and millimeter-wave technologies are key enablers to fulfill the capacity and data rate requirements of the fifth generation (5G) of mobile networks. In this context, designing low-complexity policies with local observations, yet able to adapt the user association with respect to the global network state and to the network dynamics is a challenge. In fact, the frameworks proposed in literature require continuous access to global network information and to recompute the association when the radio environment changes. With the complexity associated to such an approach, these solutions are not well suited to dense 5G networks. In this paper, we address this issue by designing a scalable and flexible algorithm for user association based on multi-agent reinforcement learning. In this approach, users act as independent agents that, based on their local observations only, learn to autonomously coordinate their actions in order to optimize the network sum-rate. Since there is no direct information exchange among the agents, we also limit the signaling overhead. Simulation results show that the proposed algorithm is able to adapt to (fast) changes of radio environment, thus providing large sum-rate gain in comparison to state-of-the-art solutions.
Joint Indoor Localization and Radio Map Construction with Limited Deployment Load
Oct 12, 2013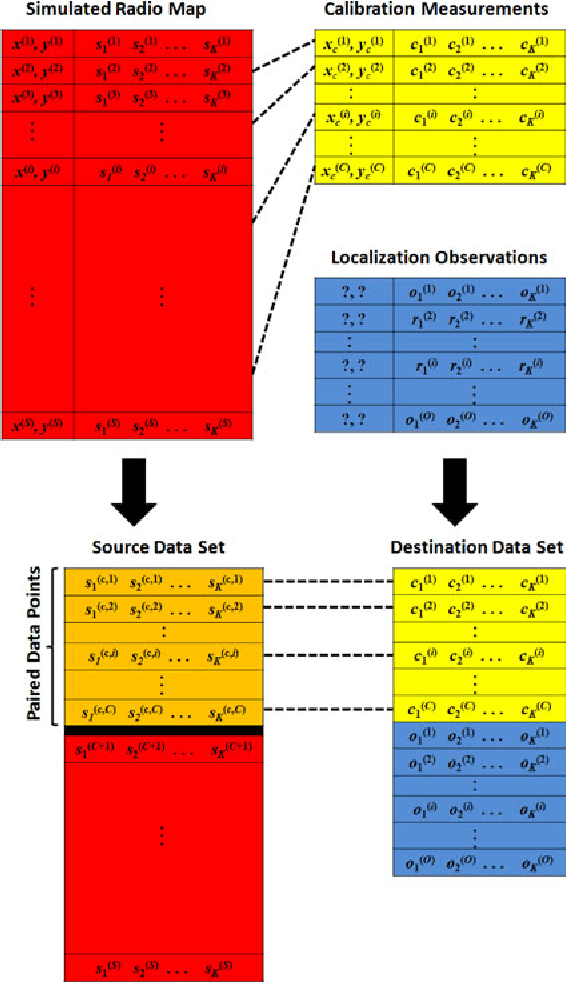
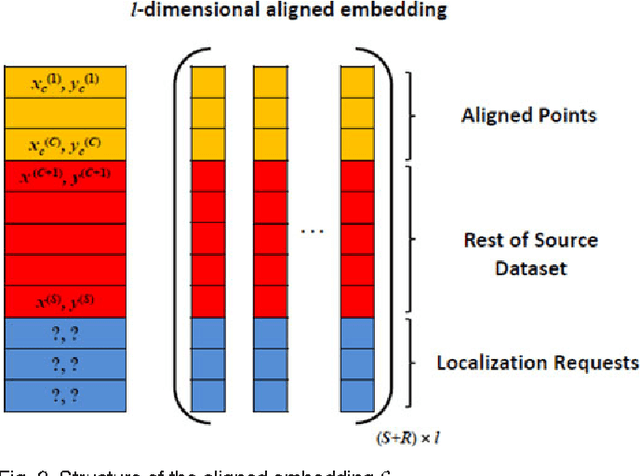
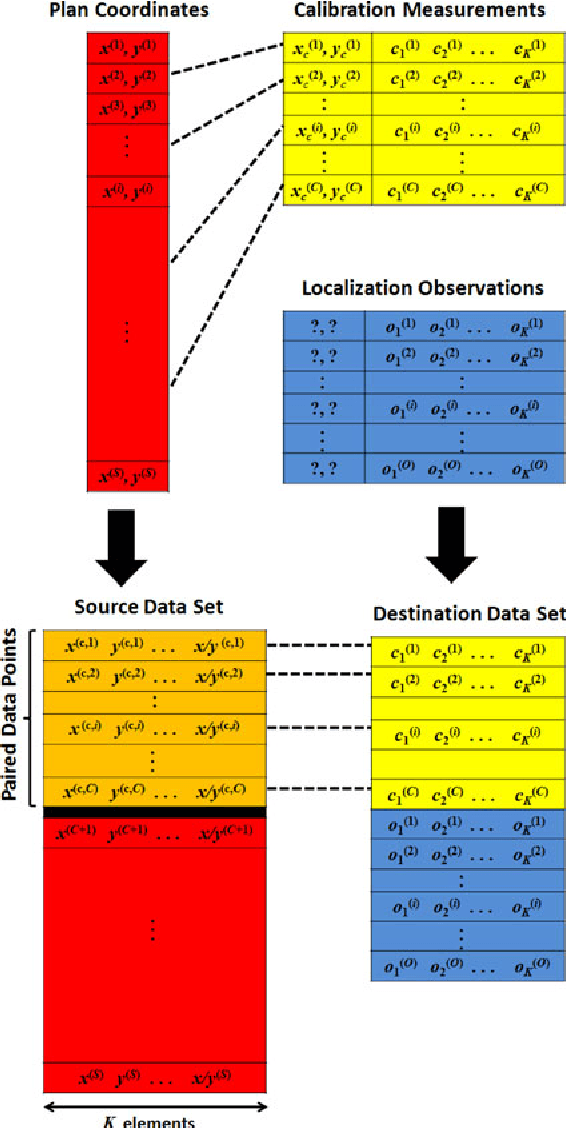

One major bottleneck in the practical implementation of received signal strength (RSS) based indoor localization systems is the extensive deployment efforts required to construct the radio maps through fingerprinting. In this paper, we aim to design an indoor localization scheme that can be directly employed without building a full fingerprinted radio map of the indoor environment. By accumulating the information of localized RSSs, this scheme can also simultaneously construct the radio map with limited calibration. To design this scheme, we employ a source data set that possesses the same spatial correlation of the RSSs in the indoor environment under study. The knowledge of this data set is then transferred to a limited number of calibration fingerprints and one or several RSS observations with unknown locations, in order to perform direct localization of these observations using manifold alignment. We test two different source data sets, namely a simulated radio propagation map and the environments plan coordinates. For moving users, we exploit the correlation of their observations to improve the localization accuracy. The online testing in two indoor environments shows that the plan coordinates achieve better results than the simulated radio maps, and a negligible degradation with 70-85% reduction in calibration load.