 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Indoor Localization and Radio Map Construction with Limited Deployment Load
Paper and Code
Oct 12, 2013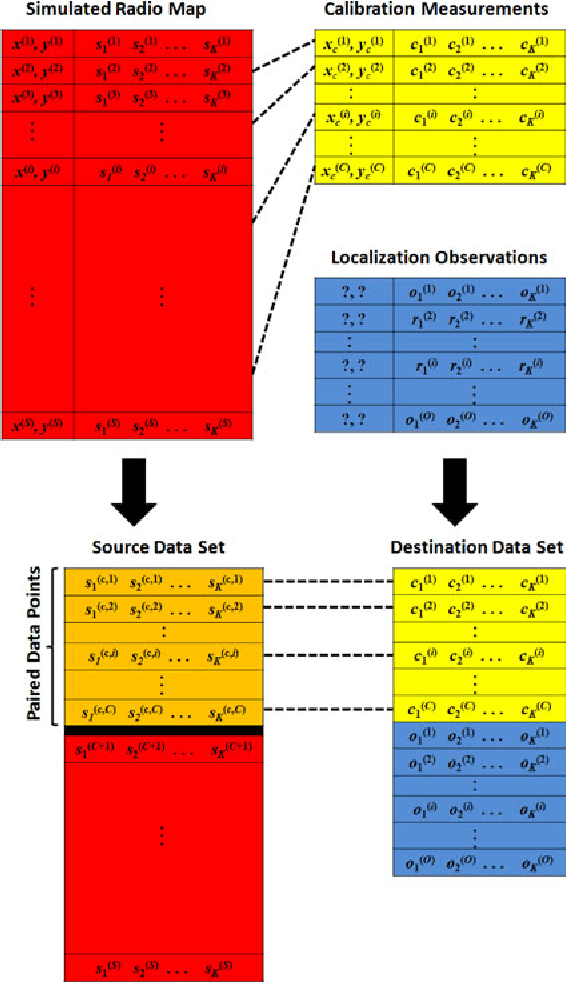
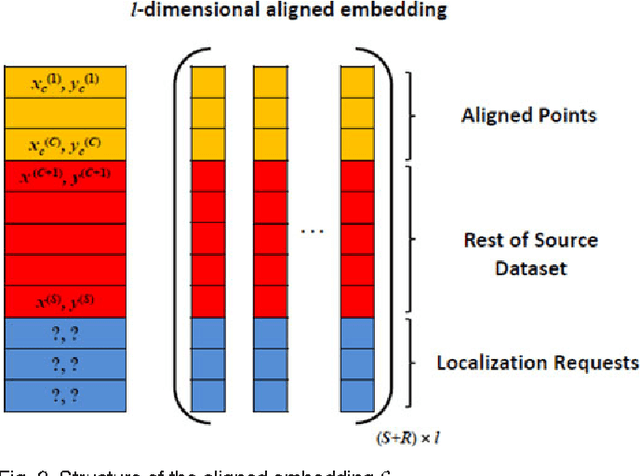
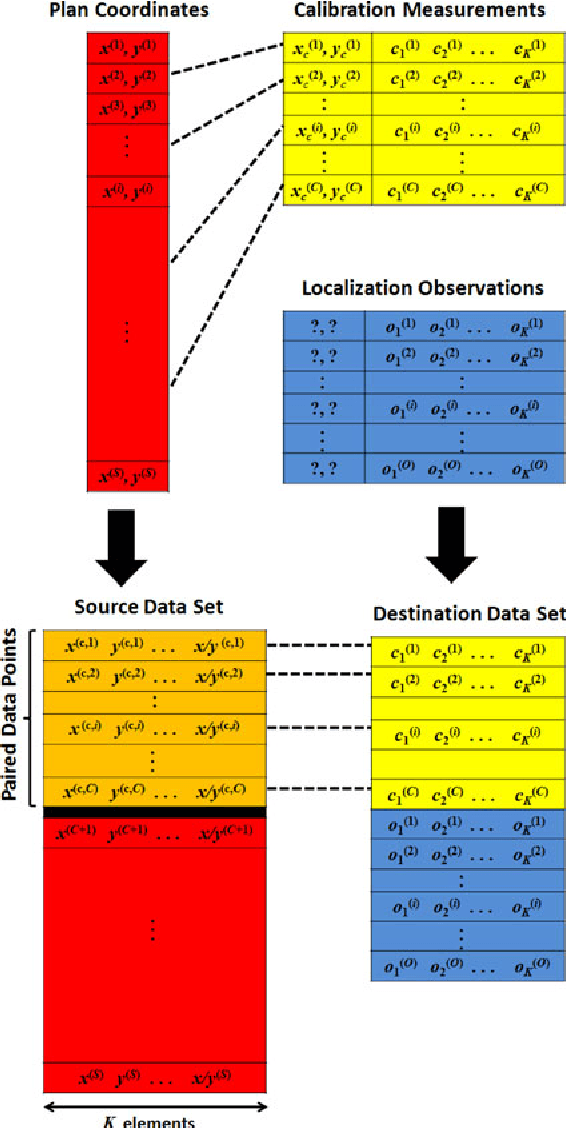

One major bottleneck in the practical implementation of received signal strength (RSS) based indoor localization systems is the extensive deployment efforts required to construct the radio maps through fingerprinting. In this paper, we aim to design an indoor localization scheme that can be directly employed without building a full fingerprinted radio map of the indoor environment. By accumulating the information of localized RSSs, this scheme can also simultaneously construct the radio map with limited calibration. To design this scheme, we employ a source data set that possesses the same spatial correlation of the RSSs in the indoor environment under study. The knowledge of this data set is then transferred to a limited number of calibration fingerprints and one or several RSS observations with unknown locations, in order to perform direct localization of these observations using manifold alignment. We test two different source data sets, namely a simulated radio propagation map and the environments plan coordinates. For moving users, we exploit the correlation of their observations to improve the localization accuracy. The online testing in two indoor environments shows that the plan coordinates achieve better results than the simulated radio maps, and a negligible degradation with 70-85% reduction in calibration load.