 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Low-Energy Adaptive Personalization for Resource-Constrained Devices
Mar 29, 2024The personalization of machine learning (ML) models to address data drift is a significant challenge in the context of Internet of Things (IoT) applications. Presently, most approaches focus on fine-tuning either the full base model or its last few layers to adapt to new data, while often neglecting energy costs. However, various types of data drift exist, and fine-tuning the full base model or the last few layers may not result in optimal performance in certain scenarios. We propose Target Block Fine-Tuning (TBFT), a low-energy adaptive personalization framework designed for resource-constrained devices. We categorize data drift and personalization into three types: input-level, feature-level, and output-level. For each type, we fine-tune different blocks of the model to achieve optimal performance with reduced energy costs. Specifically, input-, feature-, and output-level correspond to fine-tuning the front, middle, and rear blocks of the model. We evaluate TBFT on a ResNet model, three datasets, three different training sizes, and a Raspberry Pi. Compared with the $Block Avg$, where each block is fine-tuned individually and their performance improvements are averaged, TBFT exhibits an improvement in model accuracy by an average of 15.30% whilst saving 41.57% energy consumption on average compared with full fine-tuning.
A Closed-Form Solution to Local Non-Rigid Structure-from-Motion
Nov 23, 2020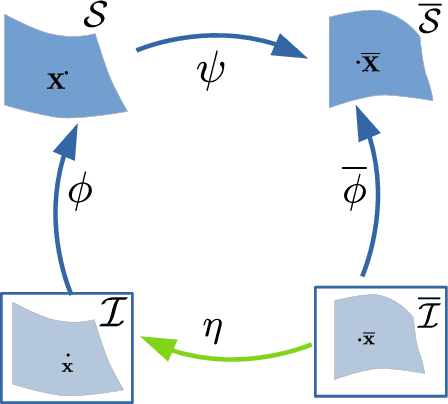
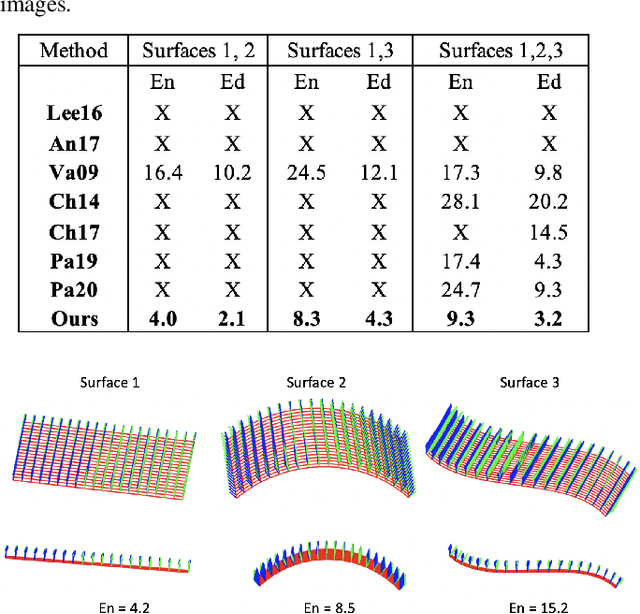
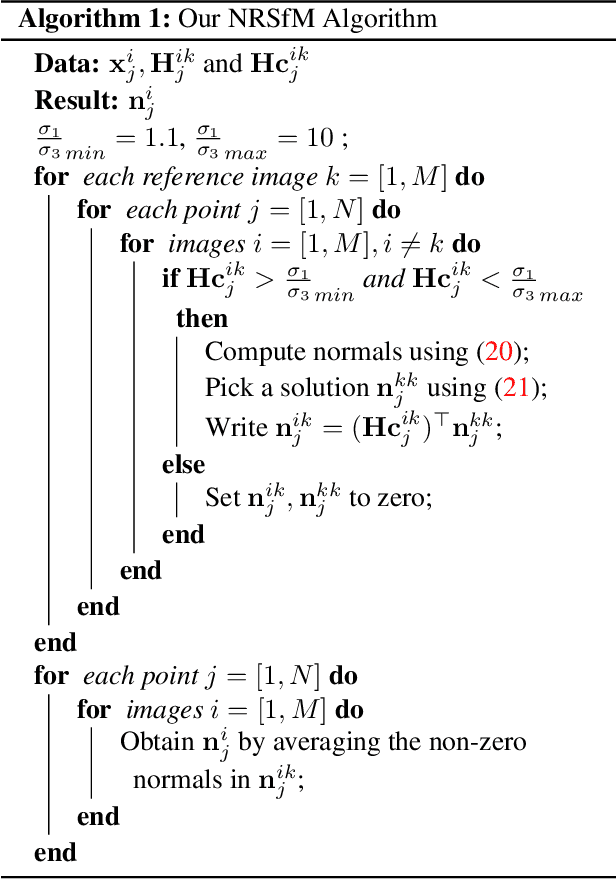
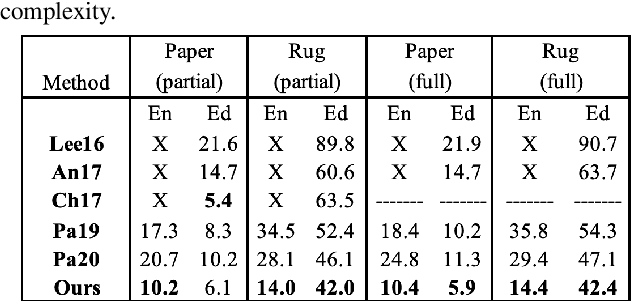
A recent trend in Non-Rigid Structure-from-Motion (NRSfM) is to express local, differential constraints between pairs of images, from which the surface normal at any point can be obtained by solving a system of polynomial equations. The systems of equations derived in previous work, however, are of high degree, having up to five real solutions, thus requiring a computationally expensive strategy to select a unique solution. Furthermore, they suffer from degeneracies that make the resulting estimates unreliable, without any mechanism to identify this situation. In this paper, we show that, under widely applicable assumptions, we can derive a new system of equation in terms of the surface normals whose two solutions can be obtained in closed-form and can easily be disambiguated locally. Our formalism further allows us to assess how reliable the estimated local normals are and, hence, to discard them if they are not. Our experiments show that our reconstructions, obtained from two or more views, are significantly more accurate than those of state-of-the-art methods, while also being faster.