 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMSD: A Benchmark Dataset for Floor Plan Generation of Building Complexes
Jul 14, 2024



Diverse and realistic floor plan data are essential for the development of useful computer-aided methods in architectural design. Today's large-scale floor plan datasets predominantly feature simple floor plan layouts, typically representing single-apartment dwellings only. To compensate for the mismatch between current datasets and the real world, we develop \textbf{Modified Swiss Dwellings} (MSD) -- the first large-scale floor plan dataset that contains a significant share of layouts of multi-apartment dwellings. MSD features over 5.3K floor plans of medium- to large-scale building complexes, covering over 18.9K distinct apartments. We validate that existing approaches for floor plan generation, while effective in simpler scenarios, cannot yet seamlessly address the challenges posed by MSD. Our benchmark calls for new research in floor plan machine understanding. Code and data are open.
Low-Light Image Enhancement Framework for Improved Object Detection in Fisheye Lens Datasets
Apr 15, 2024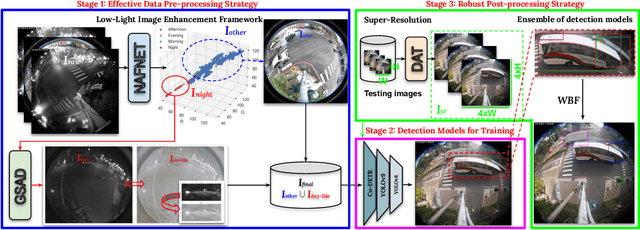
This study addresses the evolving challenges in urban traffic monitoring detection systems based on fisheye lens cameras by proposing a framework that improves the efficacy and accuracy of these systems. In the context of urban infrastructure and transportation management, advanced traffic monitoring systems have become critical for managing the complexities of urbanization and increasing vehicle density. Traditional monitoring methods, which rely on static cameras with narrow fields of view, are ineffective in dynamic urban environments, necessitating the installation of multiple cameras, which raises costs. Fisheye lenses, which were recently introduced, provide wide and omnidirectional coverage in a single frame, making them a transformative solution. However, issues such as distorted views and blurriness arise, preventing accurate object detection on these images. Motivated by these challenges, this study proposes a novel approach that combines a ransformer-based image enhancement framework and ensemble learning technique to address these challenges and improve traffic monitoring accuracy, making significant contributions to the future of intelligent traffic management systems. Our proposed methodological framework won 5th place in the 2024 AI City Challenge, Track 4, with an F1 score of 0.5965 on experimental validation data. The experimental results demonstrate the effectiveness, efficiency, and robustness of the proposed system. Our code is publicly available at https://github.com/daitranskku/AIC2024-TRACK4-TEAM15.
Skip-Connected Neural Networks with Layout Graphs for Floor Plan Auto-Generation
Sep 26, 2023



With the advent of AI and computer vision techniques, the quest for automated and efficient floor plan designs has gained momentum. This paper presents a novel approach using skip-connected neural networks integrated with layout graphs. The skip-connected layers capture multi-scale floor plan information, and the encoder-decoder networks with GNN facilitate pixel-level probability-based generation. Validated on the MSD dataset, our approach achieved a 93.9 mIoU score in the 1st CVAAD workshop challenge. Code and pre-trained models are publicly available at https://github.com/yuntaeJ/SkipNet-FloorPlanGe.