 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRALLY: Role-Adaptive LLM-Driven Yoked Navigation for Agentic UAV Swarms
Jul 02, 2025Intelligent control of Unmanned Aerial Vehicles (UAVs) swarms has emerged as a critical research focus, and it typically requires the swarm to navigate effectively while avoiding obstacles and achieving continuous coverage over multiple mission targets. Although traditional Multi-Agent Reinforcement Learning (MARL) approaches offer dynamic adaptability, they are hindered by the semantic gap in numerical communication and the rigidity of homogeneous role structures, resulting in poor generalization and limited task scalability. Recent advances in Large Language Model (LLM)-based control frameworks demonstrate strong semantic reasoning capabilities by leveraging extensive prior knowledge. However, due to the lack of online learning and over-reliance on static priors, these works often struggle with effective exploration, leading to reduced individual potential and overall system performance. To address these limitations, we propose a Role-Adaptive LLM-Driven Yoked navigation algorithm RALLY. Specifically, we first develop an LLM-driven semantic decision framework that uses structured natural language for efficient semantic communication and collaborative reasoning. Afterward, we introduce a dynamic role-heterogeneity mechanism for adaptive role switching and personalized decision-making. Furthermore, we propose a Role-value Mixing Network (RMIX)-based assignment strategy that integrates LLM offline priors with MARL online policies to enable semi-offline training of role selection strategies. Experiments in the Multi-Agent Particle Environment (MPE) environment and a Software-In-The-Loop (SITL) platform demonstrate that RALLY outperforms conventional approaches in terms of task coverage, convergence speed, and generalization, highlighting its strong potential for collaborative navigation in agentic multi-UAV systems.
Rethinking the Key Factors for the Generalization of Remote Sensing Stereo Matching Networks
Aug 14, 2024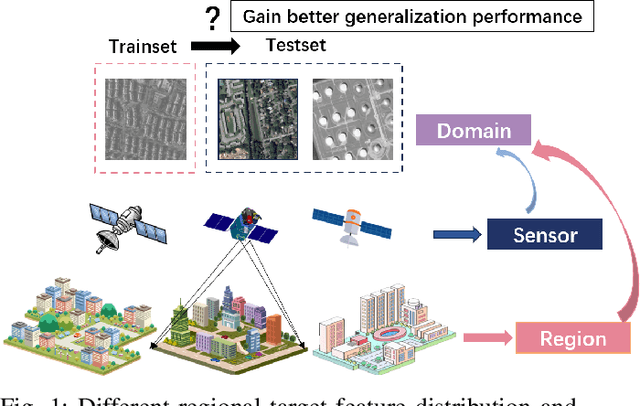
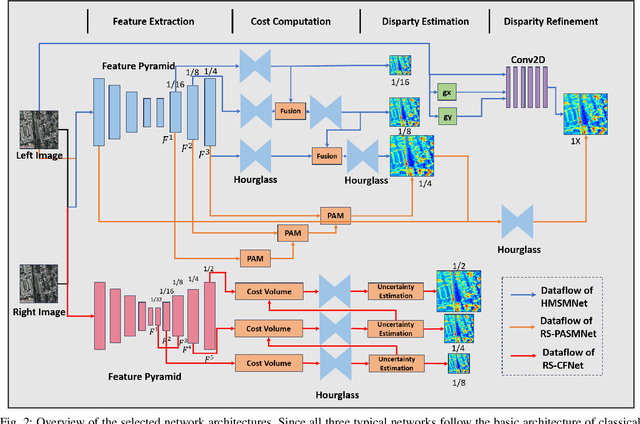
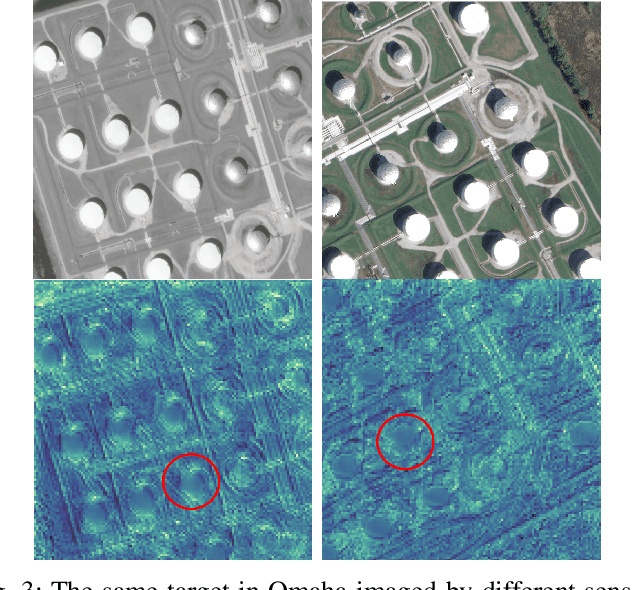
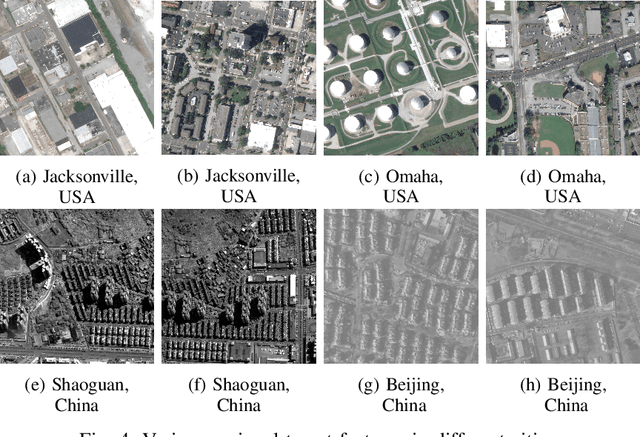
Stereo matching, a critical step of 3D reconstruction, has fully shifted towards deep learning due to its strong feature representation of remote sensing images. However, ground truth for stereo matching task relies on expensive airborne LiDAR data, thus making it difficult to obtain enough samples for supervised learning. To improve the generalization ability of stereo matching networks on cross-domain data from different sensors and scenarios, in this paper, we dedicate to study key training factors from three perspectives. (1) For the selection of training dataset, it is important to select data with similar regional target distribution as the test set instead of utilizing data from the same sensor. (2) For model structure, cascaded structure that flexibly adapts to different sizes of features is preferred. (3) For training manner, unsupervised methods generalize better than supervised methods, and we design an unsupervised early-stop strategy to help retain the best model with pre-trained weights as the basis. Extensive experiments are conducted to support the previous findings, on the basis of which we present an unsupervised stereo matching network with good generalization performance. We release the source code and the datasets at https://github.com/Elenairene/RKF_RSSM to reproduce the results and encourage future work.
Unsupervised Stereo Matching Network For VHR Remote Sensing Images Based On Error Prediction
Aug 14, 2024
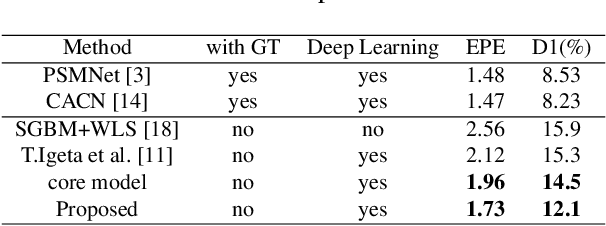
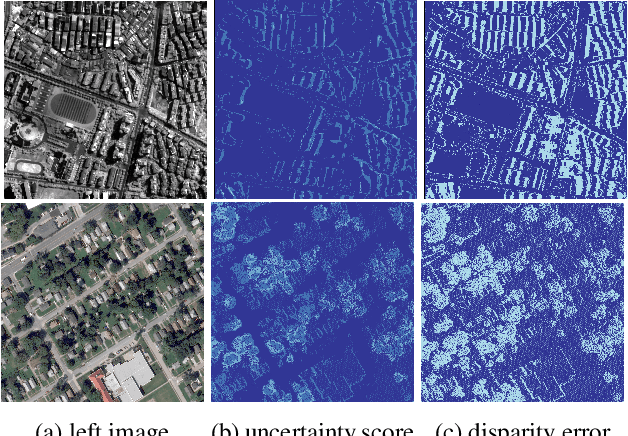
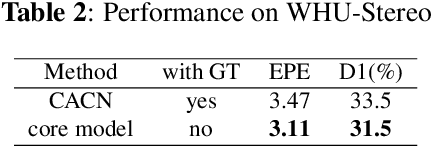
Stereo matching in remote sensing has recently garnered increased attention, primarily focusing on supervised learning. However, datasets with ground truth generated by expensive airbone Lidar exhibit limited quantity and diversity, constraining the effectiveness of supervised networks. In contrast, unsupervised learning methods can leverage the increasing availability of very-high-resolution (VHR) remote sensing images, offering considerable potential in the realm of stereo matching. Motivated by this intuition, we propose a novel unsupervised stereo matching network for VHR remote sensing images. A light-weight module to bridge confidence with predicted error is introduced to refine the core model. Robust unsupervised losses are formulated to enhance network convergence. The experimental results on US3D and WHU-Stereo datasets demonstrate that the proposed network achieves superior accuracy compared to other unsupervised networks and exhibits better generalization capabilities than supervised models. Our code will be available at https://github.com/Elenairene/CBEM.
Imitation Learning based Alternative Multi-Agent Proximal Policy Optimization for Well-Formed Swarm-Oriented Pursuit Avoidance
Nov 06, 2023



Multi-Robot System (MRS) has garnered widespread research interest and fostered tremendous interesting applications, especially in cooperative control fields. Yet little light has been shed on the compound ability of formation, monitoring and defence in decentralized large-scale MRS for pursuit avoidance, which puts stringent requirements on the capability of coordination and adaptability. In this paper, we put forward a decentralized Imitation learning based Alternative Multi-Agent Proximal Policy Optimization (IA-MAPPO) algorithm to provide a flexible and communication-economic solution to execute the pursuit avoidance task in well-formed swarm. In particular, a policy-distillation based MAPPO executor is firstly devised to capably accomplish and swiftly switch between multiple formations in a centralized manner. Furthermore, we utilize imitation learning to decentralize the formation controller, so as to reduce the communication overheads and enhance the scalability. Afterwards, alternative training is leveraged to compensate the performance loss incurred by decentralization. The simulation results validate the effectiveness of IA-MAPPO and extensive ablation experiments further show the performance comparable to a centralized solution with significant decrease in communication overheads.
Decentralized Adaptive Formation via Consensus-Oriented Multi-Agent Communication
Jul 23, 2023Adaptive multi-agent formation control, which requires the formation to flexibly adjust along with the quantity variations of agents in a decentralized manner, belongs to one of the most challenging issues in multi-agent systems, especially under communication-limited constraints. In this paper, we propose a novel Consensus-based Decentralized Adaptive Formation (Cons-DecAF) framework. Specifically, we develop a novel multi-agent reinforcement learning method, Consensus-oriented Multi-Agent Communication (ConsMAC), to enable agents to perceive global information and establish the consensus from local states by effectively aggregating neighbor messages. Afterwards, we leverage policy distillation to accomplish the adaptive formation adjustment. Meanwhile, instead of pre-assigning specific positions of agents, we employ a displacement-based formation by Hausdorff distance to significantly improve the formation efficiency. The experimental results through extensive simulations validate that the proposed method has achieved outstanding performance in terms of both speed and stability.