 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Architecture for Fast and Reliable Coagulation Assessment in Clinical Settings: Leveraging Thromboelastography
Jan 12, 2026In an ideal medical environment, real-time coagulation monitoring can enable early detection and prompt remediation of risks. However, traditional Thromboelastography (TEG), a widely employed diagnostic modality, can only provide such outputs after nearly 1 hour of measurement. The delay might lead to elevated mortality rates. These issues clearly point out one of the key challenges for medical AI development: Mak-ing reasonable predictions based on very small data sets and accounting for variation between different patient populations, a task where conventional deep learning methods typically perform poorly. We present Physiological State Reconstruc-tion (PSR), a new algorithm specifically designed to take ad-vantage of dynamic changes between individuals and to max-imize useful information produced by small amounts of clini-cal data through mapping to reliable predictions and diagnosis. We develop MDFE to facilitate integration of varied temporal signals using multi-domain learning, and jointly learn high-level temporal interactions together with attentions via HLA; furthermore, the parameterized DAM we designed maintains the stability of the computed vital signs. PSR evaluates with 4 TEG-specialized data sets and establishes remarkable perfor-mance -- predictions of R2 > 0.98 for coagulation traits and error reduction around half compared to the state-of-the-art methods, and halving the inferencing time too. Drift-aware learning suggests a new future, with potential uses well be-yond thrombophilia discovery towards medical AI applica-tions with data scarcity.
FMA-ETA: Estimating Travel Time Entirely Based on FFN With Attention
Jun 07, 2020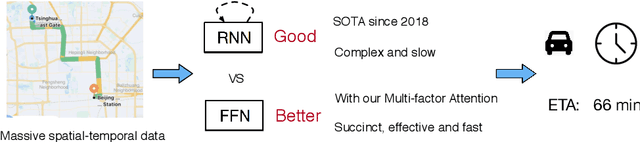

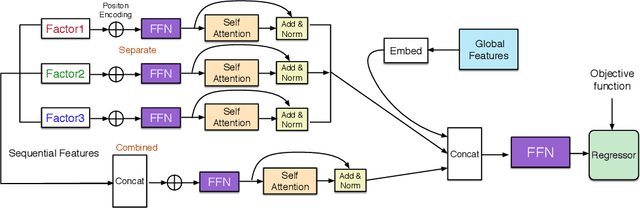
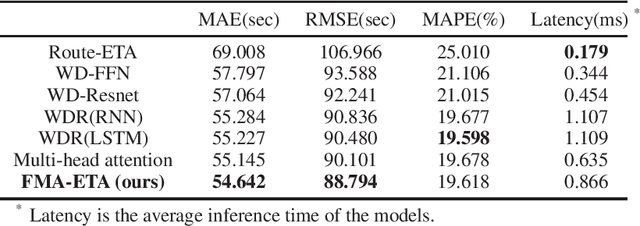
Estimated time of arrival (ETA) is one of the most important services in intelligent transportation systems and becomes a challenging spatial-temporal (ST) data mining task in recent years. Nowadays, deep learning based methods, specifically recurrent neural networks (RNN) based ones are adapted to model the ST patterns from massive data for ETA and become the state-of-the-art. However, RNN is suffering from slow training and inference speed, as its structure is unfriendly to parallel computing. To solve this problem, we propose a novel, brief and effective framework mainly based on feed-forward network (FFN) for ETA, FFN with Multi-factor self-Attention (FMA-ETA). The novel Multi-factor self-attention mechanism is proposed to deal with different category features and aggregate the information purposefully. Extensive experimental results on the real-world vehicle travel dataset show FMA-ETA is competitive with state-of-the-art methods in terms of the prediction accuracy with significantly better inference speed.
Fusion Recurrent Neural Network
Jun 07, 2020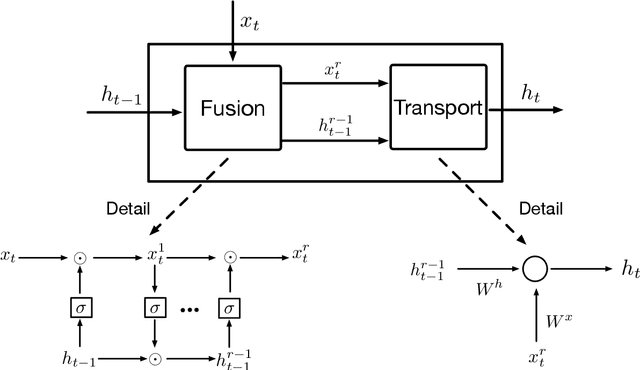
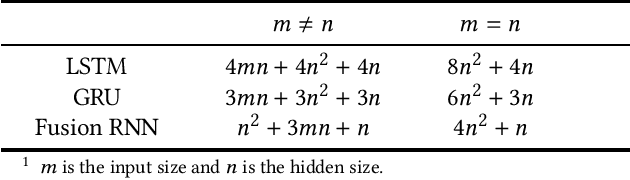
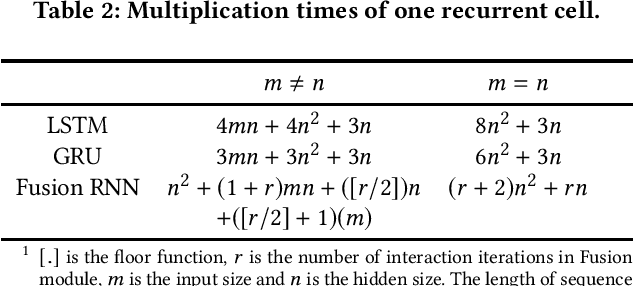
Considering deep sequence learning for practical application, two representative RNNs - LSTM and GRU may come to mind first. Nevertheless, is there no chance for other RNNs? Will there be a better RNN in the future? In this work, we propose a novel, succinct and promising RNN - Fusion Recurrent Neural Network (Fusion RNN). Fusion RNN is composed of Fusion module and Transport module every time step. Fusion module realizes the multi-round fusion of the input and hidden state vector. Transport module which mainly refers to simple recurrent network calculate the hidden state and prepare to pass it to the next time step. Furthermore, in order to evaluate Fusion RNN's sequence feature extraction capability, we choose a representative data mining task for sequence data, estimated time of arrival (ETA) and present a novel model based on Fusion RNN. We contrast our method and other variants of RNN for ETA under massive vehicle travel data from DiDi Chuxing. The results demonstrate that for ETA, Fusion RNN is comparable to state-of-the-art LSTM and GRU which are more complicated than Fusion RNN.
Constructing Geographic and Long-term Temporal Graph for Traffic Forecasting
Apr 23, 2020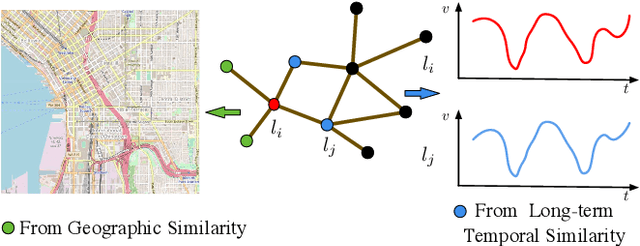
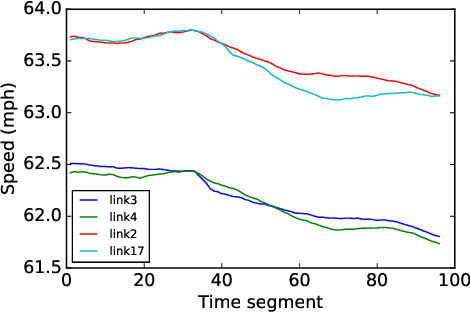
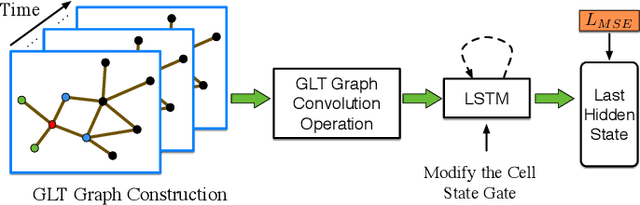
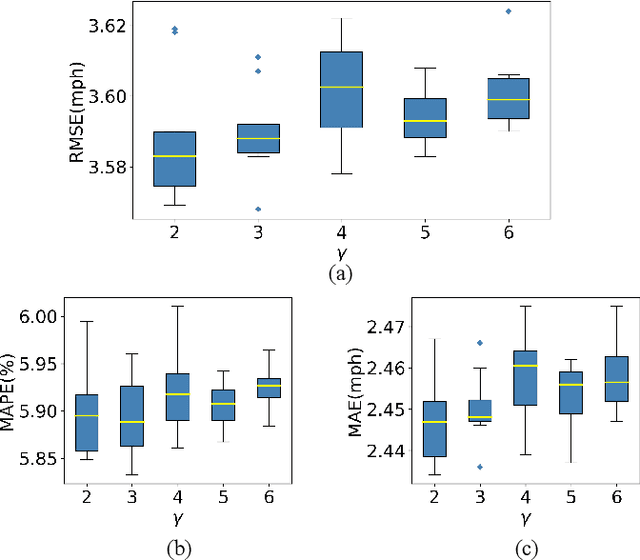
Traffic forecasting influences various intelligent transportation system (ITS) services and is of great significance for user experience as well as urban traffic control. It is challenging due to the fact that the road network contains complex and time-varying spatial-temporal dependencies. Recently, deep learning based methods have achieved promising results by adopting graph convolutional network (GCN) to extract the spatial correlations and recurrent neural network (RNN) to capture the temporal dependencies. However, the existing methods often construct the graph only based on road network connectivity, which limits the interaction between roads. In this work, we propose Geographic and Long term Temporal Graph Convolutional Recurrent Neural Network (GLT-GCRNN), a novel framework for traffic forecasting that learns the rich interactions between roads sharing similar geographic or longterm temporal patterns. Extensive experiments on a real-world traffic state dataset validate the effectiveness of our method by showing that GLT-GCRNN outperforms the state-of-the-art methods in terms of different metrics.