 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-subgoal Robot Navigation in Crowds with History Information and Interactions
May 04, 2022



Robot navigation in dynamic environments shared with humans is an important but challenging task, which suffers from performance deterioration as the crowd grows. In this paper, multi-subgoal robot navigation approach based on deep reinforcement learning is proposed, which can reason about more comprehensive relationships among all agents (robot and humans). Specifically, the next position point is planned for the robot by introducing history information and interactions in our work. Firstly, based on subgraph network, the history information of all agents is aggregated before encoding interactions through a graph neural network, so as to improve the ability of the robot to anticipate the future scenarios implicitly. Further consideration, in order to reduce the probability of unreliable next position points, the selection module is designed after policy network in the reinforcement learning framework. In addition, the next position point generated from the selection module satisfied the task requirements better than that obtained directly from the policy network. The experiments demonstrate that our approach outperforms state-of-the-art approaches in terms of both success rate and collision rate, especially in crowded human environments.
A Self-adaptive LSAC-PID Approach based on Lyapunov Reward Shaping for Mobile Robots
Nov 03, 2021
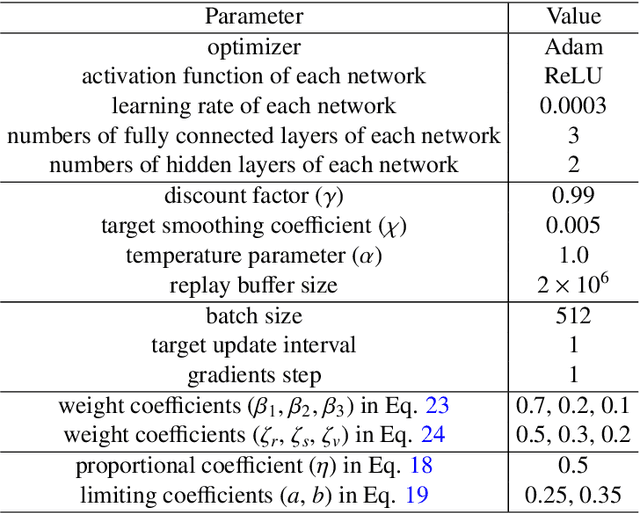
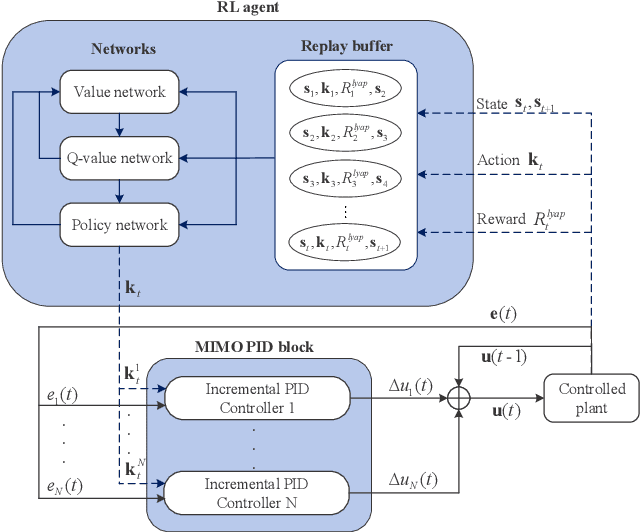
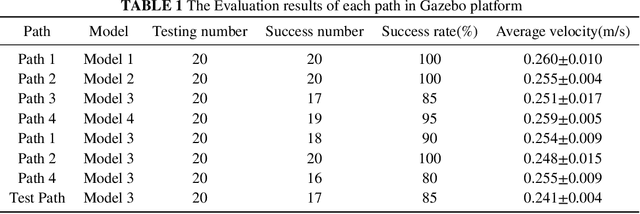
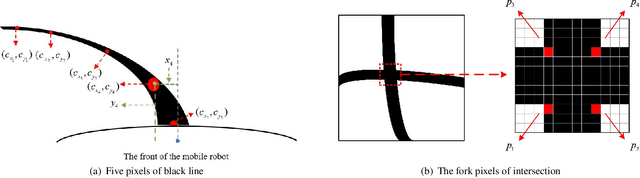
To solve the coupling problem of control loops and the adaptive parameter tuning problem in the multi-input multi-output (MIMO) PID control system, a self-adaptive LSAC-PID algorithm is proposed based on deep reinforcement learning (RL) and Lyapunov-based reward shaping in this paper. For complex and unknown mobile robot control environment, an RL-based MIMO PID hybrid control strategy is firstly presented. According to the dynamic information and environmental feedback of the mobile robot, the RL agent can output the optimal MIMO PID parameters in real time, without knowing mathematical model and decoupling multiple control loops. Then, to improve the convergence speed of RL and the stability of mobile robots, a Lyapunov-based reward shaping soft actor-critic (LSAC) algorithm is proposed based on Lyapunov theory and potential-based reward shaping method. The convergence and optimality of the algorithm are proved in terms of the policy evaluation and improvement step of soft policy iteration. In addition, for line-following robots, the region growing method is improved to adapt to the influence of forks and environmental interference. Through comparison, test and cross-validation, the simulation and real-environment experimental results all show good performance of the proposed LSAC-PID tuning algorithm.
A Self-adaptive SAC-PID Control Approach based on Reinforcement Learning for Mobile Robots
Mar 19, 2021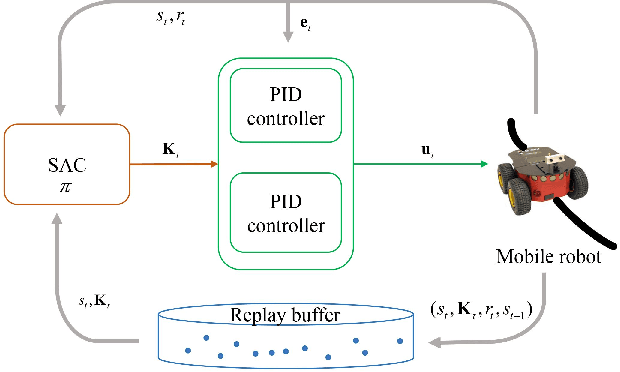

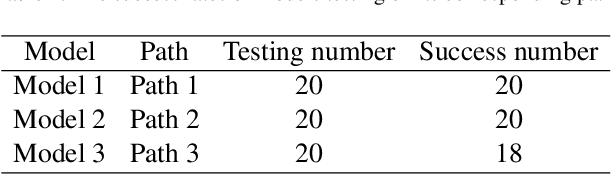
Proportional-integral-derivative (PID) control is the most widely used in industrial control, robot control and other fields. However, traditional PID control is not competent when the system cannot be accurately modeled and the operating environment is variable in real time. To tackle these problems, we propose a self-adaptive model-free SAC-PID control approach based on reinforcement learning for automatic control of mobile robots. A new hierarchical structure is developed, which includes the upper controller based on soft actor-critic (SAC), one of the most competitive continuous control algorithms, and the lower controller based on incremental PID controller. Soft actor-critic receives the dynamic information of the mobile robot as input, and simultaneously outputs the optimal parameters of incremental PID controllers to compensate for the error between the path and the mobile robot in real time. In addition, the combination of 24-neighborhood method and polynomial fitting is developed to improve the adaptability of SAC-PID control method to complex environments. The effectiveness of the SAC-PID control method is verified with several different difficulty paths both on Gazebo and real mecanum mobile robot. Futhermore, compared with fuzzy PID control, the SAC-PID method has merits of strong robustness, generalization and real-time performance.