 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Self-adaptive LSAC-PID Approach based on Lyapunov Reward Shaping for Mobile Robots
Paper and Code
Nov 03, 2021
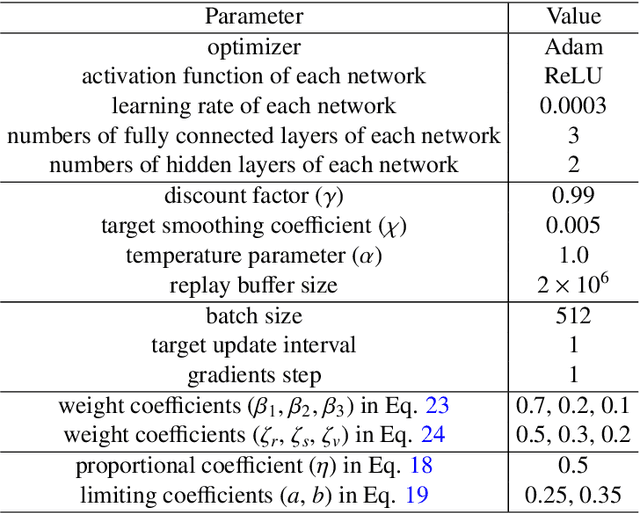
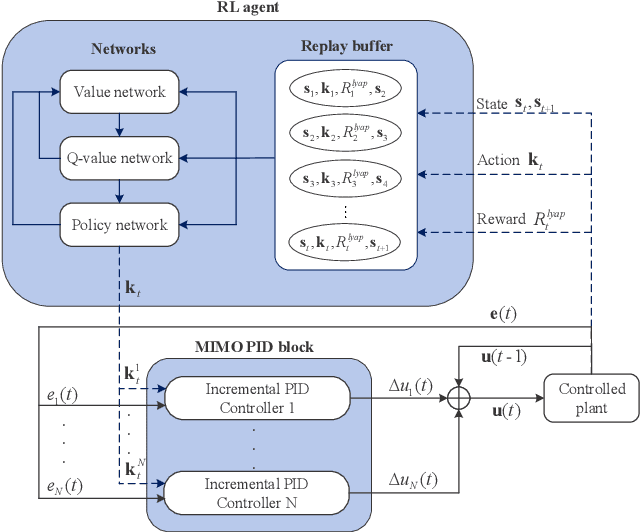
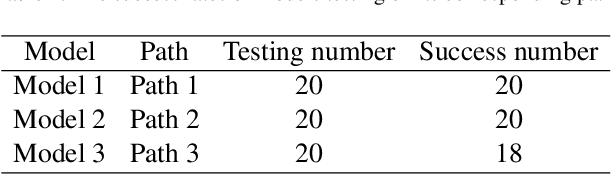
To solve the coupling problem of control loops and the adaptive parameter tuning problem in the multi-input multi-output (MIMO) PID control system, a self-adaptive LSAC-PID algorithm is proposed based on deep reinforcement learning (RL) and Lyapunov-based reward shaping in this paper. For complex and unknown mobile robot control environment, an RL-based MIMO PID hybrid control strategy is firstly presented. According to the dynamic information and environmental feedback of the mobile robot, the RL agent can output the optimal MIMO PID parameters in real time, without knowing mathematical model and decoupling multiple control loops. Then, to improve the convergence speed of RL and the stability of mobile robots, a Lyapunov-based reward shaping soft actor-critic (LSAC) algorithm is proposed based on Lyapunov theory and potential-based reward shaping method. The convergence and optimality of the algorithm are proved in terms of the policy evaluation and improvement step of soft policy iteration. In addition, for line-following robots, the region growing method is improved to adapt to the influence of forks and environmental interference. Through comparison, test and cross-validation, the simulation and real-environment experimental results all show good performance of the proposed LSAC-PID tuning algorithm.