 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlexiD-Fuse: Flexible number of inputs multi-modal medical image fusion based on diffusion model
Sep 11, 2025



Different modalities of medical images provide unique physiological and anatomical information for diseases. Multi-modal medical image fusion integrates useful information from different complementary medical images with different modalities, producing a fused image that comprehensively and objectively reflects lesion characteristics to assist doctors in clinical diagnosis. However, existing fusion methods can only handle a fixed number of modality inputs, such as accepting only two-modal or tri-modal inputs, and cannot directly process varying input quantities, which hinders their application in clinical settings. To tackle this issue, we introduce FlexiD-Fuse, a diffusion-based image fusion network designed to accommodate flexible quantities of input modalities. It can end-to-end process two-modal and tri-modal medical image fusion under the same weight. FlexiD-Fuse transforms the diffusion fusion problem, which supports only fixed-condition inputs, into a maximum likelihood estimation problem based on the diffusion process and hierarchical Bayesian modeling. By incorporating the Expectation-Maximization algorithm into the diffusion sampling iteration process, FlexiD-Fuse can generate high-quality fused images with cross-modal information from source images, independently of the number of input images. We compared the latest two and tri-modal medical image fusion methods, tested them on Harvard datasets, and evaluated them using nine popular metrics. The experimental results show that our method achieves the best performance in medical image fusion with varying inputs. Meanwhile, we conducted extensive extension experiments on infrared-visible, multi-exposure, and multi-focus image fusion tasks with arbitrary numbers, and compared them with the perspective SOTA methods. The results of the extension experiments consistently demonstrate the effectiveness and superiority of our method.
IRSAM: Advancing Segment Anything Model for Infrared Small Target Detection
Jul 10, 2024



The recent Segment Anything Model (SAM) is a significant advancement in natural image segmentation, exhibiting potent zero-shot performance suitable for various downstream image segmentation tasks. However, directly utilizing the pretrained SAM for Infrared Small Target Detection (IRSTD) task falls short in achieving satisfying performance due to a notable domain gap between natural and infrared images. Unlike a visible light camera, a thermal imager reveals an object's temperature distribution by capturing infrared radiation. Small targets often show a subtle temperature transition at the object's boundaries. To address this issue, we propose the IRSAM model for IRSTD, which improves SAM's encoder-decoder architecture to learn better feature representation of infrared small objects. Specifically, we design a Perona-Malik diffusion (PMD)-based block and incorporate it into multiple levels of SAM's encoder to help it capture essential structural features while suppressing noise. Additionally, we devise a Granularity-Aware Decoder (GAD) to fuse the multi-granularity feature from the encoder to capture structural information that may be lost in long-distance modeling. Extensive experiments on the public datasets, including NUAA-SIRST, NUDT-SIRST, and IRSTD-1K, validate the design choice of IRSAM and its significant superiority over representative state-of-the-art methods. The source code are available at: github.com/IPIC-Lab/IRSAM.
Motion planning for off-road autonomous driving based on human-like cognition and weight adaptation
Apr 27, 2024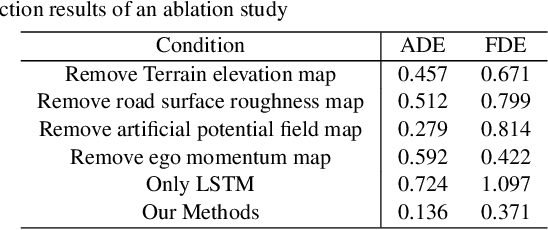
Driving in an off-road environment is challenging for autonomous vehicles due to the complex and varied terrain. To ensure stable and efficient travel, the vehicle requires consideration and balancing of environmental factors, such as undulations, roughness, and obstacles, to generate optimal trajectories that can adapt to changing scenarios. However, traditional motion planners often utilize a fixed cost function for trajectory optimization, making it difficult to adapt to different driving strategies in challenging irregular terrains and uncommon scenarios. To address these issues, we propose an adaptive motion planner based on human-like cognition and cost evaluation for off-road driving. First, we construct a multi-layer map describing different features of off-road terrains, including terrain elevation, roughness, obstacle, and artificial potential field map. Subsequently, we employ a CNN-LSTM network to learn the trajectories planned by human drivers in various off-road scenarios. Then, based on human-like generated trajectories in different environments, we design a primitive-based trajectory planner that aims to mimic human trajectories and cost weight selection, generating trajectories that are consistent with the dynamics of off-road vehicles. Finally, we compute optimal cost weights and select and extend behavioral primitives to generate highly adaptive, stable, and efficient trajectories. We validate the effectiveness of the proposed method through experiments in a desert off-road environment with complex terrain and varying road conditions. The experimental results show that the proposed human-like motion planner has excellent adaptability to different off-road conditions. It shows real-time operation, greater stability, and more human-like planning ability in diverse and challenging scenarios.