 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSIRR-LMM: Single-image Reflection Removal via Large Multimodal Model
Jan 12, 2026Glass surfaces create complex interactions of reflected and transmitted light, making single-image reflection removal (SIRR) challenging. Existing datasets suffer from limited physical realism in synthetic data or insufficient scale in real captures. We introduce a synthetic dataset generation framework that path-traces 3D glass models over real background imagery to create physically accurate reflection scenarios with varied glass properties, camera settings, and post-processing effects. To leverage the capabilities of Large Multimodal Model (LMM), we concatenate the image layers into a single composite input, apply joint captioning, and fine-tune the model using task-specific LoRA rather than full-parameter training. This enables our approach to achieve improved reflection removal and separation performance compared to state-of-the-art methods.
ePBR: Extended PBR Materials in Image Synthesis
Apr 23, 2025Realistic indoor or outdoor image synthesis is a core challenge in computer vision and graphics. The learning-based approach is easy to use but lacks physical consistency, while traditional Physically Based Rendering (PBR) offers high realism but is computationally expensive. Intrinsic image representation offers a well-balanced trade-off, decomposing images into fundamental components (intrinsic channels) such as geometry, materials, and illumination for controllable synthesis. However, existing PBR materials struggle with complex surface models, particularly high-specular and transparent surfaces. In this work, we extend intrinsic image representations to incorporate both reflection and transmission properties, enabling the synthesis of transparent materials such as glass and windows. We propose an explicit intrinsic compositing framework that provides deterministic, interpretable image synthesis. With the Extended PBR (ePBR) Materials, we can effectively edit the materials with precise controls.
Robust Edge-Direct Visual Odometry based on CNN edge detection and Shi-Tomasi corner optimization
Oct 21, 2021

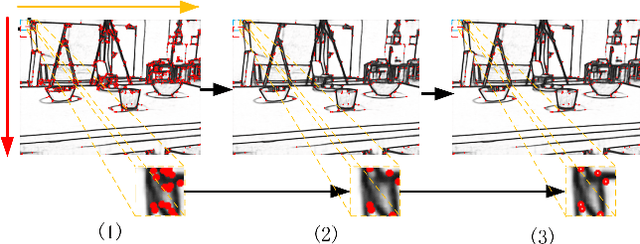
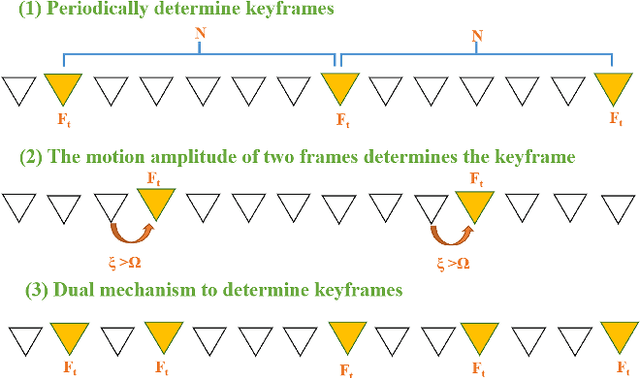
In this paper, we propose a robust edge-direct visual odometry (VO) based on CNN edge detection and Shi-Tomasi corner optimization. Four layers of pyramids were extracted from the image in the proposed method to reduce the motion error between frames. This solution used CNN edge detection and Shi-Tomasi corner optimization to extract information from the image. Then, the pose estimation is performed using the Levenberg-Marquardt (LM) algorithm and updating the keyframes. Our method was compared with the dense direct method, the improved direct method of Canny edge detection, and ORB-SLAM2 system on the RGB-D TUM benchmark. The experimental results indicate that our method achieves better robustness and accuracy.