 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Estimation of Relative Transformation Based on Fusion of Odometry and UWB Ranging Data
May 21, 2024
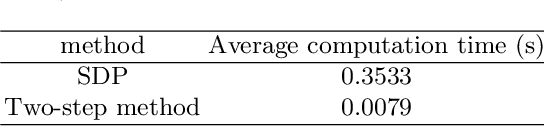
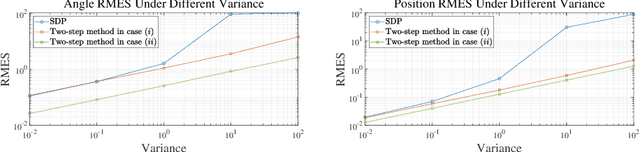

In this paper, we investigate the problem of estimating the 4-DOF (three-dimensional position and orientation) robot-robot relative frame transformation using odometers and distance measurements between robots. Firstly, we apply a two-step estimation method based on maximum likelihood estimation. Specifically, a good initial value is obtained through unconstrained least squares and projection, followed by a more accurate estimate achieved through one-step Gauss-Newton iteration. Additionally, the optimal installation positions of Ultra-Wideband (UWB) are provided, and the minimum operating time under different quantities of UWB devices is determined. Simulation demonstrates that the two-step approach offers faster computation with guaranteed accuracy while effectively addressing the relative transformation estimation problem within limited space constraints. Furthermore, this method can be applied to real-time relative transformation estimation when a specific number of UWB devices are installed.
An Adaptive Population Size Differential Evolution with Novel Mutation Strategy for Constrained Optimization
May 11, 2018



Differential evolution (DE) has competitive performance on constrained optimization problems (COPs), which targets at searching for global optimal solution without violating the constraints. Generally, researchers pay more attention on avoiding violating the constraints than better objective function value. To achieve the aim of searching the feasible solutions accurately, an adaptive population size method and an adaptive mutation strategy are proposed in the paper. The adaptive population method is similar to a state switch which controls the exploring state and exploiting state according to the situation of feasible solution search. The novel mutation strategy is designed to enhance the effect of status switch based on adaptive population size, which is useful to reduce the constraint violations. Moreover, a mechanism based on multipopulation competition and a more precise method of constraint control are adopted in the proposed algorithm. The proposed differential evolution algorithm, APDE-NS, is evaluated on the benchmark problems from CEC2017 constrained real parameter optimization. The experimental results show the effectiveness of the proposed method is competitive compared to other state-of-the-art algorithms.