 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiFuse++: Self-supervised and Efficient Bi-projection Fusion for 360 Depth Estimation
Sep 07, 2022
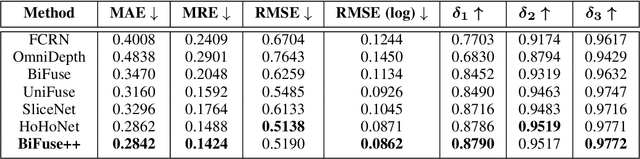
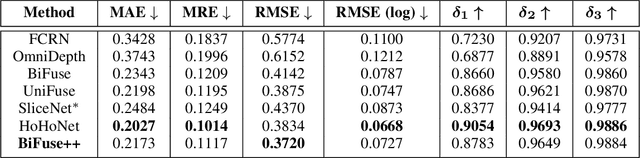
Due to the rise of spherical cameras, monocular 360 depth estimation becomes an important technique for many applications (e.g., autonomous systems). Thus, state-of-the-art frameworks for monocular 360 depth estimation such as bi-projection fusion in BiFuse are proposed. To train such a framework, a large number of panoramas along with the corresponding depth ground truths captured by laser sensors are required, which highly increases the cost of data collection. Moreover, since such a data collection procedure is time-consuming, the scalability of extending these methods to different scenes becomes a challenge. To this end, self-training a network for monocular depth estimation from 360 videos is one way to alleviate this issue. However, there are no existing frameworks that incorporate bi-projection fusion into the self-training scheme, which highly limits the self-supervised performance since bi-projection fusion can leverage information from different projection types. In this paper, we propose BiFuse++ to explore the combination of bi-projection fusion and the self-training scenario. To be specific, we propose a new fusion module and Contrast-Aware Photometric Loss to improve the performance of BiFuse and increase the stability of self-training on real-world videos. We conduct both supervised and self-supervised experiments on benchmark datasets and achieve state-of-the-art performance.
LED2-Net: Monocular 360 Layout Estimation via Differentiable Depth Rendering
Apr 03, 2021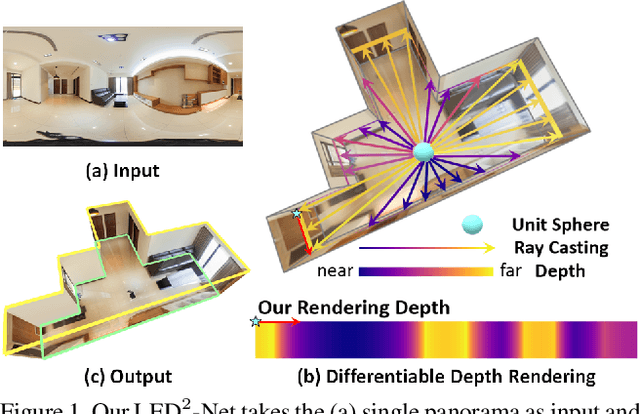

Although significant progress has been made in room layout estimation, most methods aim to reduce the loss in the 2D pixel coordinate rather than exploiting the room structure in the 3D space. Towards reconstructing the room layout in 3D, we formulate the task of 360 layout estimation as a problem of predicting depth on the horizon line of a panorama. Specifically, we propose the Differentiable Depth Rendering procedure to make the conversion from layout to depth prediction differentiable, thus making our proposed model end-to-end trainable while leveraging the 3D geometric information, without the need of providing the ground truth depth. Our method achieves state-of-the-art performance on numerous 360 layout benchmark datasets. Moreover, our formulation enables a pre-training step on the depth dataset, which further improves the generalizability of our layout estimation model.
LayoutMP3D: Layout Annotation of Matterport3D
Mar 30, 2020
Inferring the information of 3D layout from a single equirectangular panorama is crucial for numerous applications of virtual reality or robotics (e.g., scene understanding and navigation). To achieve this, several datasets are collected for the task of 360 layout estimation. To facilitate the learning algorithms for autonomous systems in indoor scenarios, we consider the Matterport3D dataset with their originally provided depth map ground truths and further release our annotations for layout ground truths from a subset of Matterport3D. As Matterport3D contains accurate depth ground truths from time-of-flight (ToF) sensors, our dataset provides both the layout and depth information, which enables the opportunity to explore the environment by integrating both cues.