 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLayoutMP3D: Layout Annotation of Matterport3D
Paper and Code
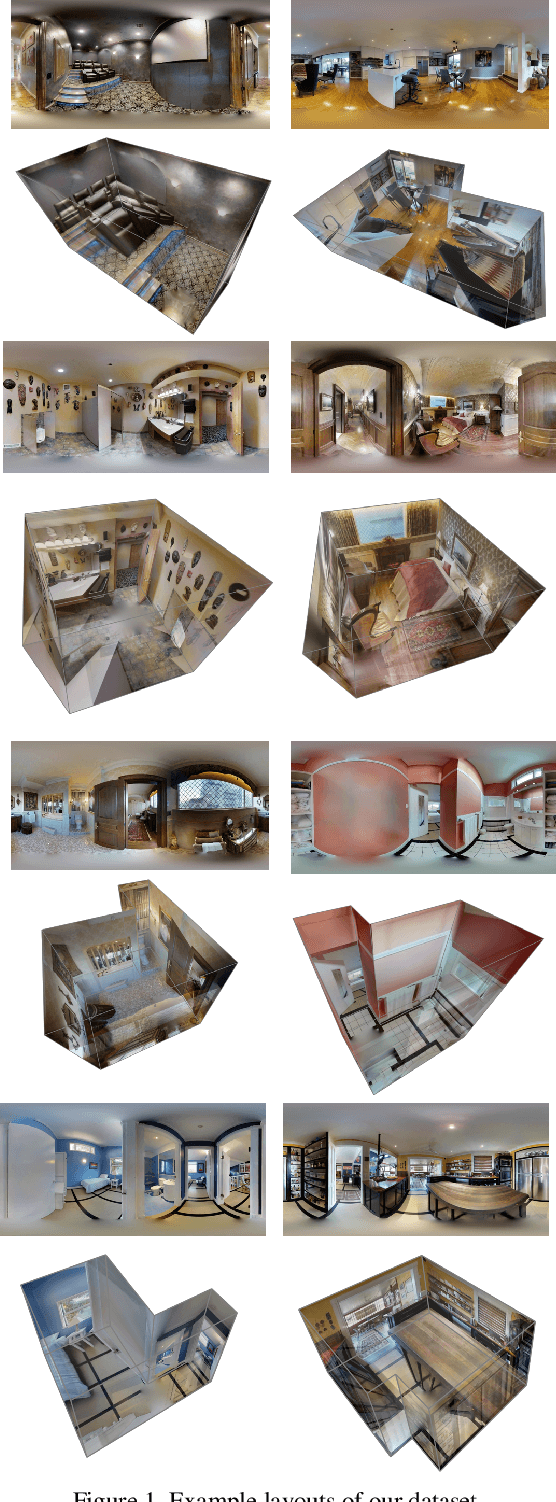
Inferring the information of 3D layout from a single equirectangular panorama is crucial for numerous applications of virtual reality or robotics (e.g., scene understanding and navigation). To achieve this, several datasets are collected for the task of 360 layout estimation. To facilitate the learning algorithms for autonomous systems in indoor scenarios, we consider the Matterport3D dataset with their originally provided depth map ground truths and further release our annotations for layout ground truths from a subset of Matterport3D. As Matterport3D contains accurate depth ground truths from time-of-flight (ToF) sensors, our dataset provides both the layout and depth information, which enables the opportunity to explore the environment by integrating both cues.