 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConsistent Attack: Universal Adversarial Perturbation on Embodied Vision Navigation
Jun 12, 2022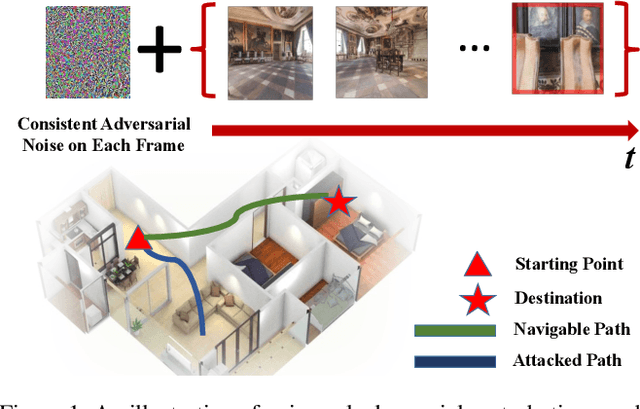
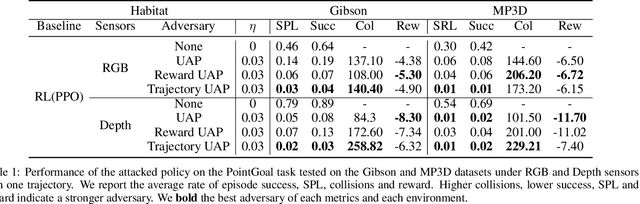

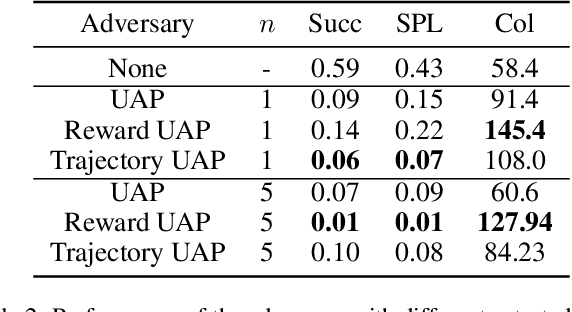
Embodied agents in vision navigation coupled with deep neural networks have attracted increasing attention. However, deep neural networks are vulnerable to malicious adversarial noises, which may potentially cause catastrophic failures in Embodied Vision Navigation. Among these adversarial noises, universal adversarial perturbations (UAP), i.e., the image-agnostic perturbation applied on each frame received by the agent, are more critical for Embodied Vision Navigation since they are computation-efficient and application-practical during the attack. However, existing UAP methods do not consider the system dynamics of Embodied Vision Navigation. For extending UAP in the sequential decision setting, we formulate the disturbed environment under the universal noise $\delta$, as a $\delta$-disturbed Markov Decision Process ($\delta$-MDP). Based on the formulation, we analyze the properties of $\delta$-MDP and propose two novel Consistent Attack methods for attacking Embodied agents, which first consider the dynamic of the MDP by estimating the disturbed Q function and the disturbed distribution. In spite of victim models, our Consistent Attack can cause a significant drop in the performance for the Goalpoint task in habitat. Extensive experimental results indicate that there exist potential risks for applying Embodied Vision Navigation methods to the real world.
Understanding Adversarial Attacks on Observations in Deep Reinforcement Learning
Jun 30, 2021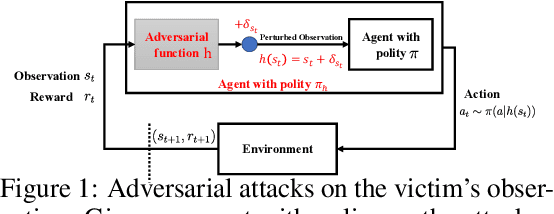
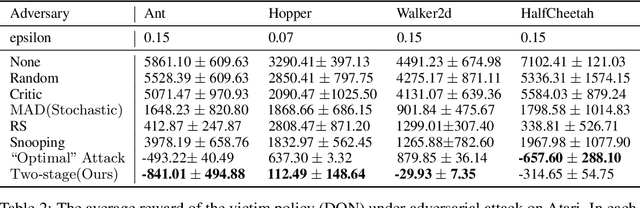
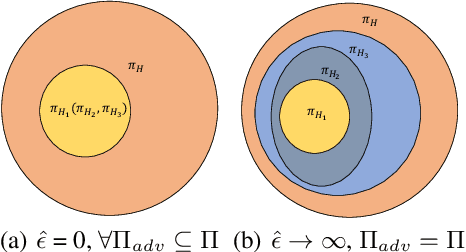
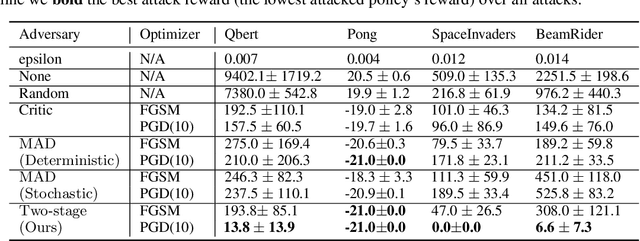
Recent works demonstrate that deep reinforcement learning (DRL) models are vulnerable to adversarial attacks which can decrease the victim's total reward by manipulating the observations. Compared with adversarial attacks in supervised learning, it is much more challenging to deceive a DRL model since the adversary has to infer the environmental dynamics. To address this issue, we reformulate the problem of adversarial attacks in function space and separate the previous gradient based attacks into several subspace. Following the analysis of the function space, we design a generic two-stage framework in the subspace where the adversary lures the agent to a target trajectory or a deceptive policy. In the first stage, we train a deceptive policy by hacking the environment, and discover a set of trajectories routing to the lowest reward. The adversary then misleads the victim to imitate the deceptive policy by perturbing the observations. Our method provides a tighter theoretical upper bound for the attacked agent's performance than the existing approaches. Extensive experiments demonstrate the superiority of our method and we achieve the state-of-the-art performance on both Atari and MuJoCo environments.
Composite Binary Decomposition Networks
Nov 16, 2018



Binary neural networks have great resource and computing efficiency, while suffer from long training procedure and non-negligible accuracy drops, when comparing to the full-precision counterparts. In this paper, we propose the composite binary decomposition networks (CBDNet), which first compose real-valued tensor of each layer with a limited number of binary tensors, and then decompose some conditioned binary tensors into two low-rank binary tensors, so that the number of parameters and operations are greatly reduced comparing to the original ones. Experiments demonstrate the effectiveness of the proposed method, as CBDNet can approximate image classification network ResNet-18 using 5.25 bits, VGG-16 using 5.47 bits, DenseNet-121 using 5.72 bits, object detection networks SSD300 using 4.38 bits, and semantic segmentation networks SegNet using 5.18 bits, all with minor accuracy drops.