 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymmetry-Guided Multi-Agent Inverse Reinforcement Learning
Sep 11, 2025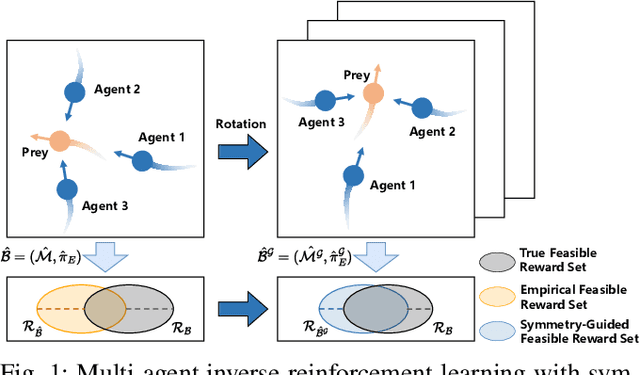
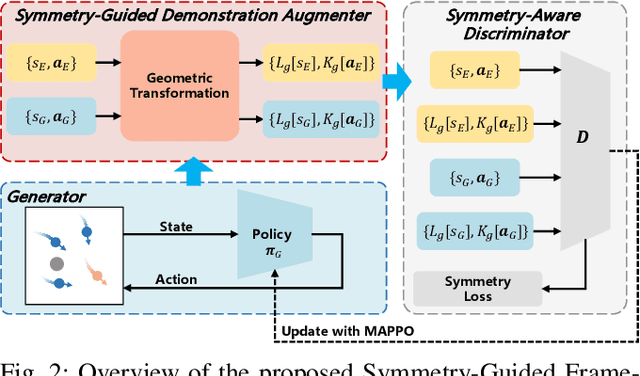
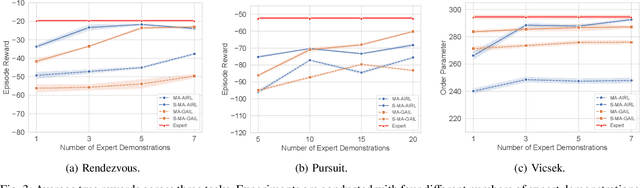
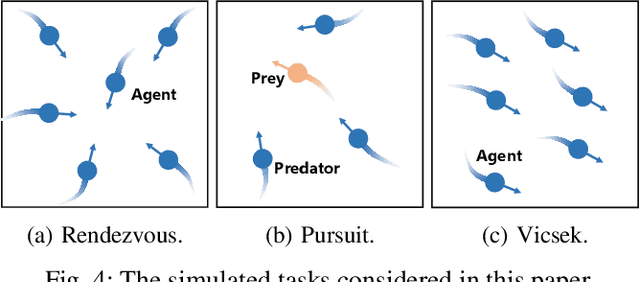
In robotic systems, the performance of reinforcement learning depends on the rationality of predefined reward functions. However, manually designed reward functions often lead to policy failures due to inaccuracies. Inverse Reinforcement Learning (IRL) addresses this problem by inferring implicit reward functions from expert demonstrations. Nevertheless, existing methods rely heavily on large amounts of expert demonstrations to accurately recover the reward function. The high cost of collecting expert demonstrations in robotic applications, particularly in multi-robot systems, severely hinders the practical deployment of IRL. Consequently, improving sample efficiency has emerged as a critical challenge in multi-agent inverse reinforcement learning (MIRL). Inspired by the symmetry inherent in multi-agent systems, this work theoretically demonstrates that leveraging symmetry enables the recovery of more accurate reward functions. Building upon this insight, we propose a universal framework that integrates symmetry into existing multi-agent adversarial IRL algorithms, thereby significantly enhancing sample efficiency. Experimental results from multiple challenging tasks have demonstrated the effectiveness of this framework. Further validation in physical multi-robot systems has shown the practicality of our method.
Leveraging Partial Symmetry for Multi-Agent Reinforcement Learning
Dec 30, 2023
Incorporating symmetry as an inductive bias into multi-agent reinforcement learning (MARL) has led to improvements in generalization, data efficiency, and physical consistency. While prior research has succeeded in using perfect symmetry prior, the realm of partial symmetry in the multi-agent domain remains unexplored. To fill in this gap, we introduce the partially symmetric Markov game, a new subclass of the Markov game. We then theoretically show that the performance error introduced by utilizing symmetry in MARL is bounded, implying that the symmetry prior can still be useful in MARL even in partial symmetry situations. Motivated by this insight, we propose the Partial Symmetry Exploitation (PSE) framework that is able to adaptively incorporate symmetry prior in MARL under different symmetry-breaking conditions. Specifically, by adaptively adjusting the exploitation of symmetry, our framework is able to achieve superior sample efficiency and overall performance of MARL algorithms. Extensive experiments are conducted to demonstrate the superior performance of the proposed framework over baselines. Finally, we implement the proposed framework in real-world multi-robot testbed to show its superiority.
ESP: Exploiting Symmetry Prior for Multi-Agent Reinforcement Learning
Aug 09, 2023



Multi-agent reinforcement learning (MARL) has achieved promising results in recent years. However, most existing reinforcement learning methods require a large amount of data for model training. In addition, data-efficient reinforcement learning requires the construction of strong inductive biases, which are ignored in the current MARL approaches. Inspired by the symmetry phenomenon in multi-agent systems, this paper proposes a framework for exploiting prior knowledge by integrating data augmentation and a well-designed consistency loss into the existing MARL methods. In addition, the proposed framework is model-agnostic and can be applied to most of the current MARL algorithms. Experimental tests on multiple challenging tasks demonstrate the effectiveness of the proposed framework. Moreover, the proposed framework is applied to a physical multi-robot testbed to show its superiority.